2026年版 スマートウォッチの選び方 iPhone・Android別におすすめモデルを紹介
スマートウォッチを初めて選ぶ人向けに、対応スマホ、健康管理、通知、決済、バッテリー、スポーツ機能の違いを整理し、Amazonで購入しやすい代表製品を紹介します。
今回は、OpenWrtのUBUSコマンドの使い方について紹介します。
UBUSとは、OpenWrt専用アプリケーション間で利用されるプロセス間通信システム(IPC)です。
OpenWrt専用アプリケーションの中にはUBUSのIPC実装を組み込み、他アプリケーション(クライアント)に対して 自身の機能を公開するものがあります(機能を公開するものをUBUSサーバーアプリケーションと呼びます)。
UBUSコマンドは、それらUBUSサーバーアプリケーションが公開する機能の実行要求や通知イベントの送信・受信などをUBUSシステム(ubusd)に 依頼するユーティリティツールです。
そのため、主にクライアントアプリケーションが特定のUBUSサーバーアプリケーションの公開機能を実行したいときに使用します。
UBUSコマンドの使い方を理解すれば、OpenWrtアプリケーションに対してより深い理解が得られると思います。 少なくとも、プロセス間同士の連携や役割分担などについて詳細に動作を把握できるようになり、アプリケーション開発に役立つでしょう。
今回はそんなUBUSコマンドの使い方について紹介します。
この記事では、UBUSについてその仕組みやデータ構造から説明し、各コマンドの使い方と実行例を掲載します。
UBUS学習の参考サイト紹介
UBUSの学習に役立つサイトを紹介します。以下のサイトを読むことでコマンドの使用方法だけでなく、その実装方法についても理解できます。
私の記事と併用して読むとより理解に繋がると思います。
冒頭でも説明したように、UBUSはOpenWrt専用アプリケーション間で利用されるプロセス間通信(IPC)システムです。
次の図に示すように、UBUSシステム(ubusd)を介してアプリケーション(実行プロセス)同士が処理の実行要求や結果応答 、通知イベントをやり取りします。
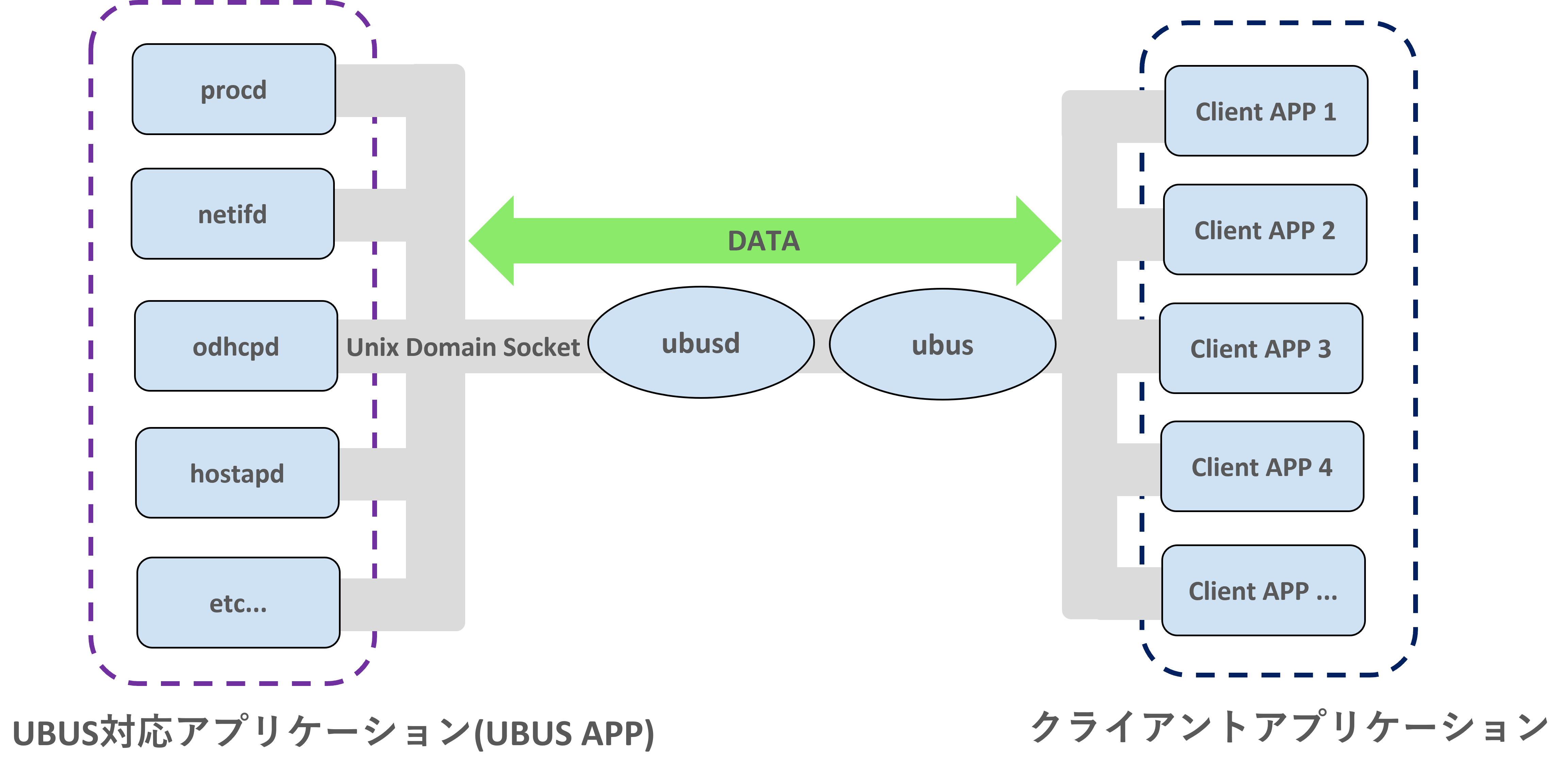
このとき、UBUSシステム(ubusd)はアプリケーション間の窓口として機能します。
これはクライアントアプリケーションがUBUSのプロセス間通信を利用してUBUSサーバーアプリケーション(UBUS APP)に公開機能の実行要求を出した場合、 その実行要求先はUBUSシステムになるということを意味します。
実行要求を受けたUBUSシステムは自身に接続されているUBUSサーバーアプリケーション(UBUS APP)の中に要求先が存在しないか確認します。
そして、要求先のアプリケーションが見つかった場合は、要求内容をその特定アプリケーションに渡し、UBUSシステムは要求元のクライアントアプリケーションに結果応答を返します。
このように、UBUSによるIPCでは常にUBUSシステムが制御主体(または通信の仲介)となってデータの送受信が実施されます。
上記で説明する通信シーケンスを実現するために、UBUSによるIPCを利用するアプリケーション同士はUBUSシステム(ubusd)への接続実装が必要です。 その上で機能を公開する側、それを利用するクライアント側で以下に挙げる処理を別々に実装する必要があります。
[機能を公開するアプリケーション側]
クライアントからの要求やイベント通知を受けて特定の処理を実行するようなUBUSサーバーアプリケーション(UBUS APP)では、自身の機能をUBUSシステムに
公開する処理の実装も必要です。これらの処理はlibubusと呼ばれるC言語ライブラリを使用することでアプリケーションに実装することができます。

[公開機能を使用するクライアント側]
クライアントアプリケーション(Client APP)はUBUSシステムに実行要求やイベント通知をするために、libubusを使用した実装またはユーティリティツール(ubus)の利用が必要です。
例えば、クライアントアプリケーションをスクリプトと仮定した場合、クライアントユーティリティツールのubusを利用することが考えられます。

ubusはUBUSシステムのubusdに接続し、UBUSサーバーアプリケーションの特定処理に対する実行要求やイベント通知をクライアントアプリケーションに代わって実施します。
ubusが持つコマンドを一般的にはUBUSコマンドと呼び、この記事で紹介するメインテーマになります。
UBUSの主な通信形態は、1対1通信と1対多通信、多対多通信の3つです。
UBUSによる最も一般的な通信です。
後の節で使い方を説明するcallコマンドやsendコマンド等で実行される通信です。
実行要求元のクライアントアプリケーションと要求先のサーバーアプリケーションが1対1で通信します。
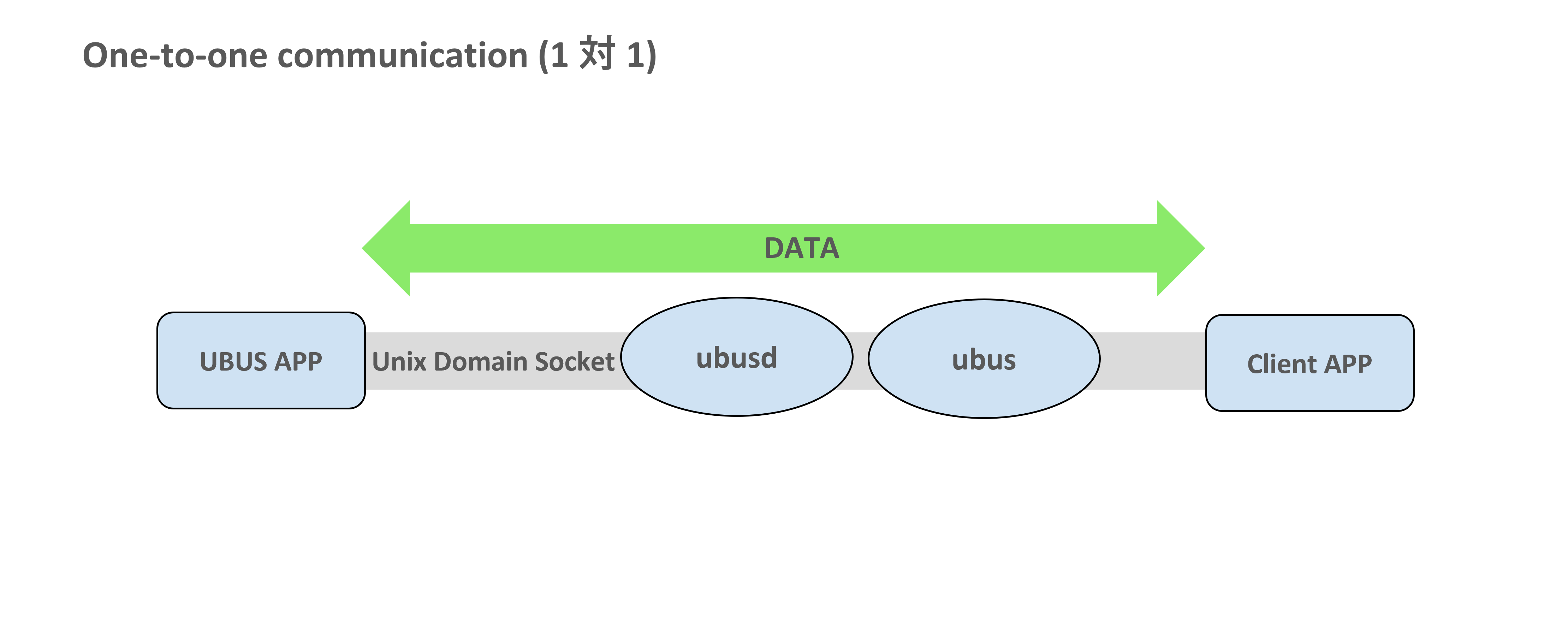
このような通信関係は、1つのクライアントアプリケーションが特定のUBUSサーバーアプリケーションから何らかの処理結果を取得する際に成立します。
subscribeコマンドを利用すると実現できる通信形態です。
UBUS上で通知される特定アプリケーションのイベントを購読(サブスクライブ)することで実現されます。
購読者(サブスクライバー)が複数になると1対多通信の関係になります。
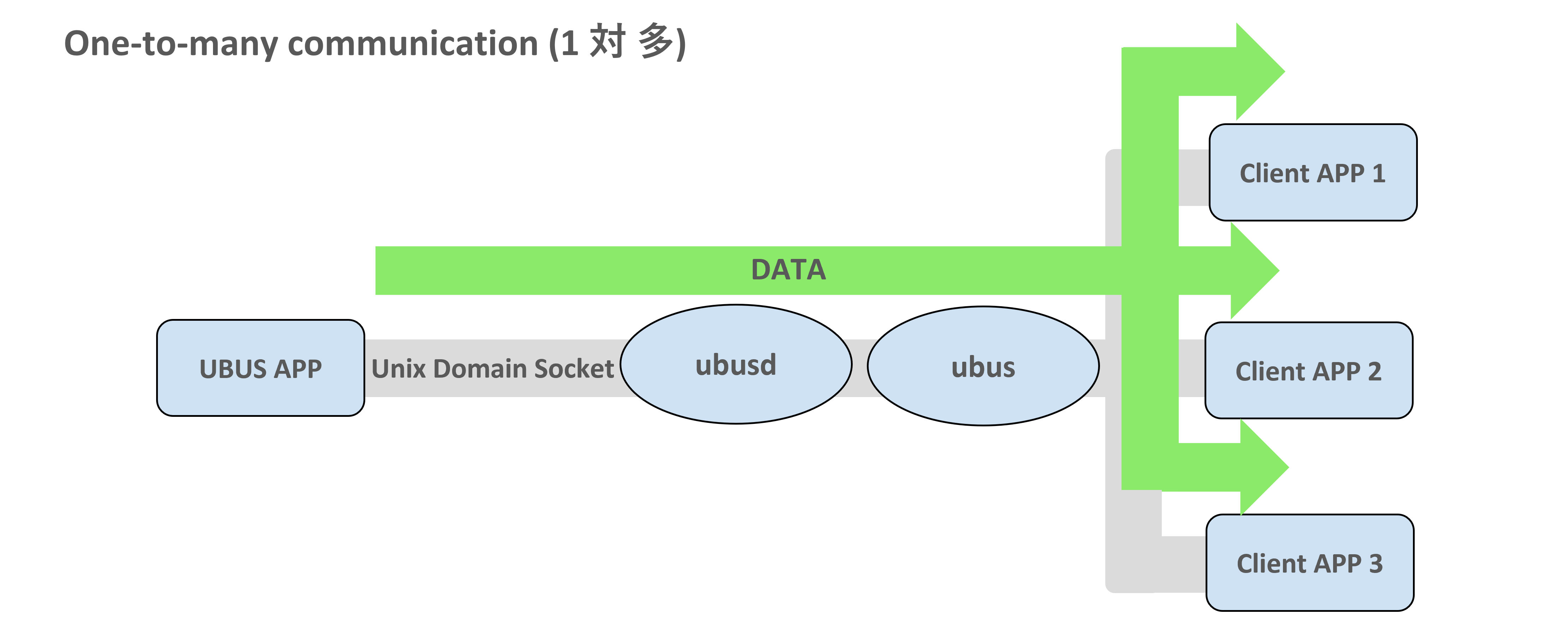
このような通信関係は、1つのUBUSサーバーアプリケーションから何らかのサービス情報を配信してもらいたい複数のクライアントアプリケーション が存在する場合に成り立ちます。
1対多の通信もあるなら多対多通信も当然あります。
subscribeコマンドによるイベント購読に加え、特定イベントの受信をトリガーとするcallコマンド、sendコマンド
などの実行がある場合です。
イベントの送受信を契機に相互に影響し合うプロセス間の通信で多対多通信が成立します。 このような関係での通信シーケンスは複雑になりがちです。
UBUSシステム(ubusd)上で取り扱うデータとして代表的なものにオブジェクトとメソッドがあります。
これはUBUSサーバーアプリケーション(UBUS APP)が自身の機能をUBUSを介して外部へ公開する際に、UBUSシステムに登録する公開機能の管理データです。 UBUSシステムへのオブジェクト・メソッドの登録はシステムブートやアプリの再起動、アプリのインストール時などで実施されます(①)。
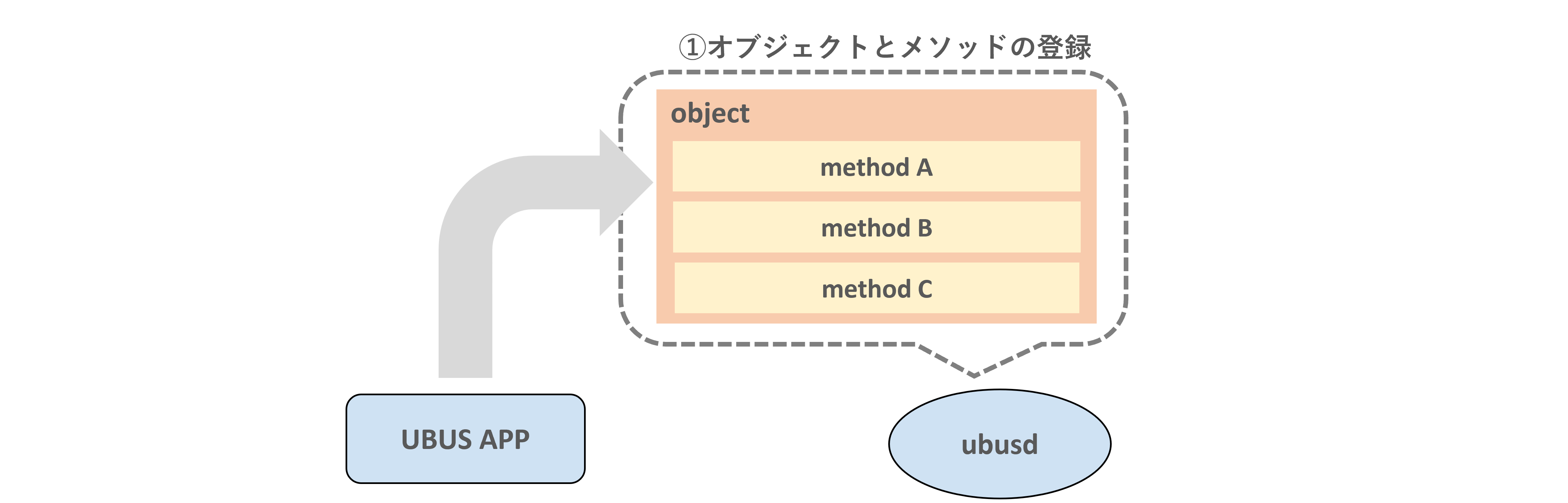
この管理データの構造は非常に単純で、公開機能そのものを示すメソッド<method>と、関連するメソッドを集約するオブジェクト<path>という 2つのデータで構成されます。
上図は、'object'という名前のオブジェクトの中に'methodA'、'methodB'、'methodC'と呼ばれる3つメソッドが管理された状態で、UBUS APPの公開機能がUBUSシステムに登録される様子を表しています。
通常、クライアントアプリケーションはUBUSコマンドのcallコマンドを使用して、あるオブジェクト<path>が持つメソッド<method>の 実行要求をUBUSシステムに送信することが出来ます。つまり、上図のmethod Aの実行要求をUBUSシステムに送信したい場合は、ubus call object methodAとするということです(②)。
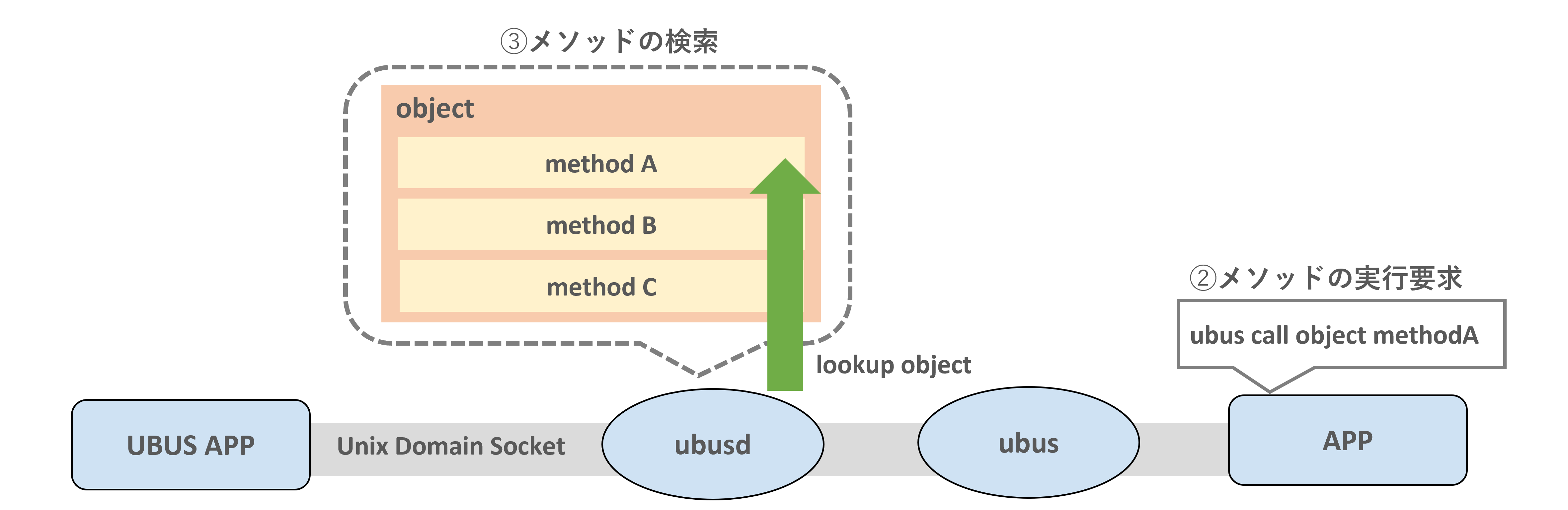
このようにして、UBUSコマンドのcallコマンドが呼び出されると指定オブジェクト・メソッドの実行要求が窓口であるUBUSシステム(ubusd)に送信されます。 そしてこの時に、UBUSシステムは自身が管理するデータの中で該当するオブジェクト・メソッドがないか確認します(③)。
確認の結果、該当のオブジェクト・メソッドがあれば、それを公開している大元のUBUSサーバーアプリケーションに実行要求を通知します(④)。
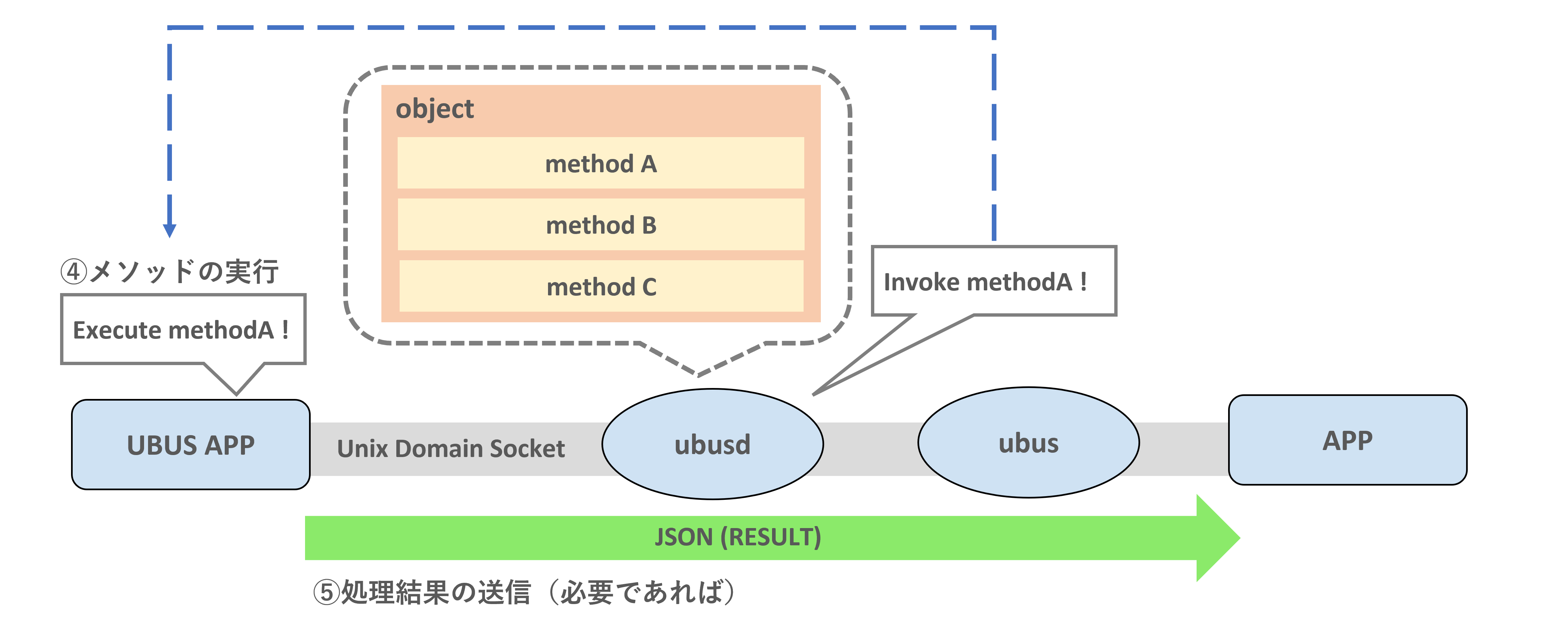
実行要求を受信した当該アプリケーションは、'method A'に対応する処理を実行します。 処理実行後、その結果応答を返す場合はUBUSシステムに対してその応答をJSONとして返します。
そして最終的に、UBUSを介して実行要求元のクライアントアプリケーションにJSONの結果応答が届きます。
以上のことから、クライアント側からはUBUSサーバーアプリケーションが公開している機能はオブジェクト・メソッドのデータモデルとして見えます。 そのため、任意のオブジェクト・メソッドがどんなアプリケーションの所属かはシステム上から意識されることはありません。
このように、UBUSシステムではオブジェクト・メソッドというデータ構造を利用して管理下にあるアプリケーションのプロセス機能を表現しています。
次はUBUSシステムのクライアントユーティリティであるubusのヘルプ画面です。 このヘルプ画面はコマンドプロンプト上でubusと打ち込むと表示されます。
Usage: ubus [<options>] <command> [arguments...]
Options:
-s <socket>: Set the unix domain socket to connect to
-t <timeout>: Set the timeout (in seconds) for a command to complete
-S: Use simplified output (for scripts)
-v: More verbose output
-m <type>: (for monitor): include a specific message type
(can be used more than once)
-M <r|t> (for monitor): only capture received or transmitted traffic
Commands:
- list [<path>] List objects
- call <path> <method> [<message>] Call an object method
- subscribe <path> [<path>...] Subscribe to object(s) notifications
- listen [<path>...] Listen for events
- send <type> [<message>] Send an event
- wait_for <object> [<object>...] Wait for multiple objects to appear on ubus
- monitor Monitor ubus traffic
これを見ると、UBUSコマンドはlist、call、subscribe、 listen、send、wait_for、monitor の計7個ということが分かります。(ちなみに、subscribeコマンドは後から追加されたものらしいです。)
次節では、実行例を交えてUBUSコマンドの説明をします。
実行フォーマット
ubus list [<path>]
UBUSが管理するアプリケーションの公開オブジェクトをリストアップしてコンソールに表示します。
次は ubus list を実行して、UBUSに登録されている全てのオブジェクトを表示した例です。 このコマンドを実行することで、どんなオブジェクトが公開されているか確認できます。
root@OpenWrt:~# ubus list
container
dhcp
dnsmasq
dnsmasq.dns
hostapd
hostapd.phy0-ap0
hotplug.dhcp
hotplug.ieee80211
hotplug.iface
hotplug.neigh
hotplug.net
hotplug.ntp
hotplug.tftp
log
network
network.device
network.interface
network.interface.lan
network.interface.loopback
network.interface.wan
network.wireless
service
system
wpa_supplicant
ただし、普通はこれで満足できないものです。オブジェクトだけでなく、そのオブジェクトが管理するメソッドのリストと引数指定の情報 も欲しいからです。
この場合、 ubus -v list [<path>] でオブジェクトの詳細情報を確認することができます。
次は ubus -v list network でnetifdのnetworkオブジェクトが持つメソッドの詳細を表示させた例です。
root@OpenWrt:~# ubus -v list network
'network' @845898a7
"restart":{}
"reload":{}
"add_host_route":{"target":"String","v6":"Boolean","interface":"String","exclude":"Boolean"}
"get_proto_handlers":{}
"add_dynamic":{"name":"String"}
"netns_updown":{"jail":"String","start":"Boolean"}
これを見ると、netifdのnetworkオブジェクトは合計で6つのメソッドを所有していることが分かります。 各メソッドの引数指定についても記載されています。この情報を基にcallコマンドでメソッドを適切に実行することが可能です。
実行フォーマット
ubus call <path> <method> [<message>]
UBUSサーバーアプリケーションの公開オブジェクトが管理するメソッドを実行します。
メソッドに対して引数が必要な場合、その引数をJSON形式のデータ(JSON[1])として指定する必要があります。 また、メソッドが呼び出し元に結果を返す場合、JSON形式の結果(JSON[2])が送信されます。
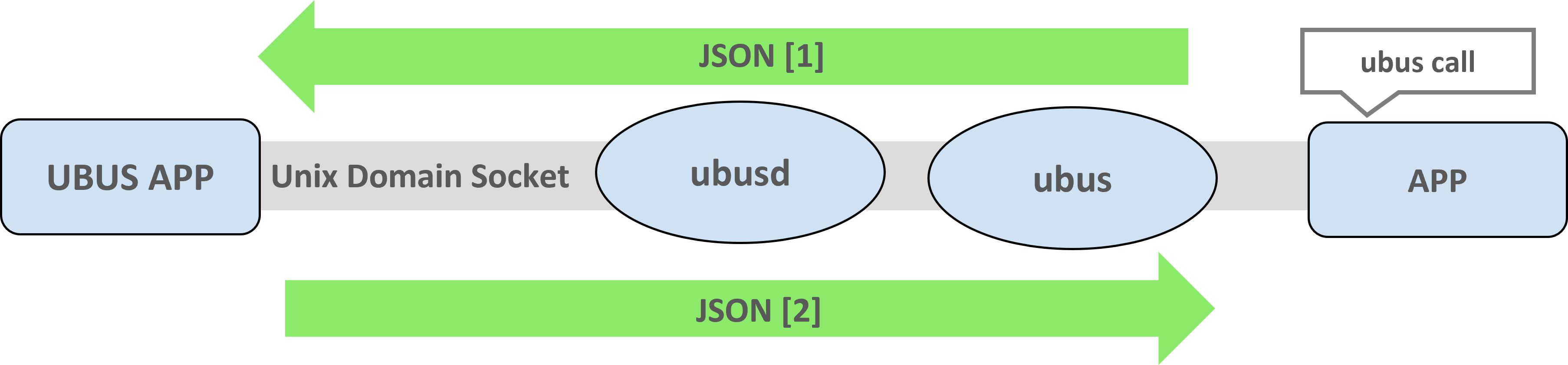
callコマンドによるJSONの流れはメソッドの動作仕様に依存します。引数なしのメソッドもありますし、 処理結果を呼び出し元に返さないメソッドもあります。
実行例を1つ挙げましょう。
これはnetifdが公開するnetwork.deviceオブジェクトのstatusメソッドを引数'{"name":"eth0"}'で呼び出した例です。
statusメソッドに対し、引数としてNIC名のeth0を指定してコール(実行要求)したことになります。
root@OpenWrt:~# ubus call network.device status '{"name":"eth0"}' { "external": false, "present": true, "type": "Network device", "up": true, "carrier": true, "auth_status": false, "link-advertising": [ "10baseT-H", "10baseT-F", "100baseT-H", "100baseT-F" ], "link-partner-advertising": [ "10baseT-H", "10baseT-F", "100baseT-H", "100baseT-F" ], "link-supported": [ "10baseT-H", "10baseT-F", "100baseT-H", "100baseT-F" ], ...以下省略
結果として、eth0のイーサーネットフレーム関連情報がJSONで返されることが確認できます。
今回は、JSONが実行要求と結果応答のそれぞれで送受信されました。 しかし、例えばlogreadが管理するlogオブジェクトのwriteメソッドなどでは実行要求の時のみ、JSONが送信されます。
このことからも、引数指定や結果応答の有無はオブジェクトとメソッドを公開する各アプリケーションの仕様に依存します。
実行フォーマット
ubus subscribe <path> [<path>]
任意のオブジェクト<path>の通知を購読(サブスクライブ)します。
このとき、通知をサブスクライブするプロセスを購読者(サブスクライバー)と呼びます。 コマンドプロンプト上でsubscribeコマンドを実行すれば、そのコンソールプロセスがオブジェクト<path>のサブスクライバーになります。
オブジェクト<path>を管理するUBUSサーバーアプリケーション はサブスクライバーに対する通知処理の実装が必要です。
つまり、subscribeコマンドはサブスクライバーに対して通知を送信できるオブジェクト<path> に対してのみ有効なコマンドです。利用者は予め、そのオブジェクトが通知サブスクリプションに対応しているのか知っている必要があります。
オブジェクト通知のサブスクライブはプロセス間通信において、1対多の通信を実現します。
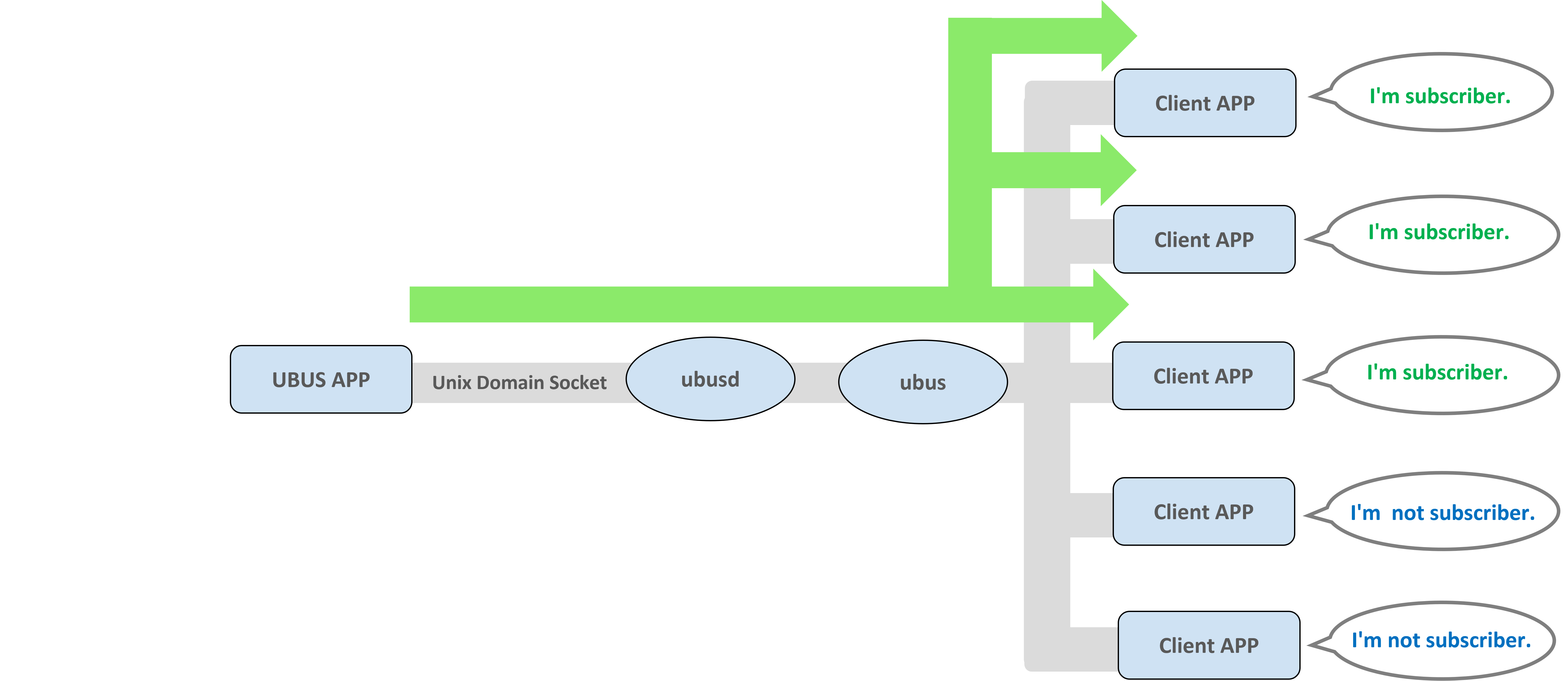
上図のように複数プロセスがオブジェクトのサブスクライバーになったとき、サブスクライバーの全てがオブジェクトの通知を受信します。
これにより、UBUSサーバーアプリケーション側は複数の連携アプリケーション・機能に対して一斉にイベントデータを送信することができます。
実行フォーマット
ubus listen [<path>...]
UBUS上でやり取りされるイベントをリッスンしてコンソールに表示します。
listenコマンドの使い方は2通りです。全てのイベントを受け取る ubus listen と、特定のイベントのみを受け取る ubus listen <path> です。
[1]:listenコマンドの実行 root@OpenWrt:~# ubus listen & .......イベントのリッスン待ちになります。
[2]:sendコマンドによるイベント送信 root@OpenWrt:~# ubus send sample '{"user":"utakamo","website":"https://utakamo.com"}'
root@OpenWrt:~# ubus listen & root@OpenWrt:~# { "sample": {"user":"utakamo","website":"https://utakamo.com"} } [3]:イベントのリッスン結果
[1]:listenコマンドの実行 root@OpenWrt:~# ubus listen sample & .......sampleイベントのリッスン待ちになります。
[2]:sendコマンドによるイベント送信 root@OpenWrt:~# ubus send sample '{"user":"utakamo","website":"https://utakamo.com"}' root@OpenWrt:~# ubus send coffee '{"name":"bluemountain","smell":"excellent","taste":"excellent"}'
root@OpenWrt:~# ubus listen sample & root@OpenWrt:~# { "sample": {"user":"utakamo","website":"https://utakamo.com"} } [3]:イベントのリッスン結果
実行フォーマット
ubus send <type> [<message>]
UBUSに特定イベント<type>を送信するコマンドです。

このイベントはJSONデータ<message>を任意で持つことができます。
UBUSサーバーアプリケーションの中には、特定イベント<type>がUBUSに届いたときに それを受け取るものがあります。
これは、そのアプリが起動時に特定イベントの受け取りをUBUSに対して予め伝えているからです。 (この部分はlibubusライブラリ(C言語用)を使用して実装していたりします。ちなみにコンソールやスクリプト上ではubus listen [<path>]で受け取ることができます。)
これによって、UBUSサーバーアプリケーションはイベントの受信を契機とした特定処理の実行が可能です。
ポイント
UBUSに登録して、その詳細を外部へ公開するオブジェクト・メソッドと、今回の話で出たイベント受信時の処理は扱いが異なります。
オブジェクト・メソッドはその性質上、ubus -v listなどで、その詳細を利用者が容易に知ることができます。
これは、利用者が特定処理の実行をそのアプリに要求したいことがあり、必要な情報を知りたいケースがあるためです。 (公開オブジェクト・メソッドの機能を利用したアプリケーションの開発や単純なスクリプト作成などが考えられます。)
一方、イベント受信時の処理は、予め利用者がどんなイベントをUBUSに送信すれば望みの処理がされるのか知っている必要があります。 これらの知識はソースコード解析やアプリケーション開発者による仕様公開により手に入れられます。 つまり、特定のアプリケーションがどんなイベントを受信して、どんな処理をするのかという情報はUBUSコマンドでは公開されていません。
一般的に、特定イベント<type>の受信によって実行される処理は、そのアプリケーションまたは システム内部でのみ利用されるものです。外部へ提供されるようなものではありません。
そのため、イベントの送受信とその対応は、そのアプリケーション自身と密接に関連するもの同士だけで行われることが多いです。 エコシステムと今後の拡張性を考慮して外部に機能を提供するというニュアンスよりも、UBUSシステムではそのようなプロセス間通信機能 があるので一連のサービス実装で利用したというニュアンスが強いと考えられます。
よって、このコマンドに対する理解が必要な人は、イベント受信の仕組みを利用するサービスを実装した(したい)開発者です。
root@OpenWrt:~# opkg install ubus-sample02_1.0-1_aarch64_cortex-a53.ipk
| モデル | パッケージ | ハッシュ(SHA256) |
|---|---|---|
| Raspberry Pi1 | ubus-sample02_1.0-1_arm_arm1176jzf-s_vfp.ipk | a7c4f92ca33294bdc146141bac01433fe0acf4da5b74371d4ecf21545aeb4460 |
| Raspberry Pi2 | ubus-sample02_1.0-1_arm_cortex-a7_neon-vfpv4.ipk | ddba723629960a18c6aefa691d4373505944c968ad9fa3dc071b371109e86303 |
| Raspberry Pi3 | ubus-sample02_1.0-1_aarch64_cortex-a53.ipk | b4b3ae504d5b0a2f69db24dcef4b710c2651593e29a853e8d1d4d495f901191f |
| Raspberry Pi4 | ubus-sample02_1.0-1_aarch64_cortex-a72.ipk | 08058889d766d537be12c13012dfe275e7539cb71cd98fbd027c8350331c4afa |
root@OpenWrt:~# ubus send sample-event
root@OpenWrt:~# cat /tmp/ubus-sample02/reply
count:1
フォーマット
ubus wait_for <object> [<object>...]
指定オブジェクトがUBUSに公開されるまで実行元のプロセスを待機させるコマンドです。 デフォルトでは30秒の間、引数<object>で指定したオブジェクトの登録を待ちます。 30秒を超過した場合はタイムアウトになります。
wait_forコマンドはアプリケーションにおいて、特定のオブジェクトの登録(連携アプリケーションのインストールやシステムブートなどによるアプリ起動)によって 依存関係を解消する必要のある機能のために用意されています。
つまり、そのオブジェクトがwait_forコマンドのタイムアウト時間内に登録できれば依存関係にある機能を実行し、 逆に登録出来なければその機能の実行を事前にキャンセルするようなスクリプトを書くことができます。 (そのため、オブジェクト登録を待つ性質上、特定アプリケーションの再起動や新規インストール、システムブートなどの場面で利用されることが考えられます。)
その他、特定のアプリケーションの拡張機能としてオブジェクトの登録を待つときなどで使用できます。
このようにwait_forコマンド使用して指定オブジェクトの登録を待つことで、以後、そのオブジェクトが使用できるか否かを判断することができます。
root@OpenWrt:~# ubus wait_for sample01
root@OpenWrt:~# opkg install ubus-sample01_1.0-1_aarch64_cortex-a53.ipk
| モデル | パッケージ | ハッシュ(SHA256) |
|---|---|---|
| Raspberry Pi1 | ubus-sample01_1.0-1_arm_arm1176jzf-s_vfp.ipk | 9fa0bb4dfa60f27c3beeb0b0b86a570d4577f481c8ead7bc28d35ae8ec3ea7c1 |
| Raspberry Pi2 | ubus-sample01_1.0-1_arm_cortex-a7_neon-vfpv4.ipk | 1a345977f494d1e5d4fef1cf974cdd7592e821ff283707306fb10e329f008dc3 |
| Raspberry Pi3 | ubus-sample01_1.0-1_aarch64_cortex-a53.ipk | f1043b2e773dc8b37cc8f887c0e3ee45fc1d2ceca2e24de2d6b9c542350f6ef5 |
| Raspberry Pi4 | ubus-sample01_1.0-1_aarch64_cortex-a72.ipk | bdd486f5f3e6e892846549e2744659ddafeeb594bcc89a756752bae5028f81ac |
root@OpenWrt:~# ubus wait_for sample01 <---前回のコマンド実行 root@OpenWrt:~# <---sample01オブジェクトが登録された直後にコンソールに操作が戻ります。
実行フォーマット
ubus monitor
UBUS上で送受信されるデータをモニタリングするコマンドです。実行後に、callコマンドやsendコマンド を使用することで、その際にやり取りされたデータの詳細を確認することができます。
root@OpenWrt:~# ubus monitor
-> 43fa907f #00000003 status: {"status":0}
root@OpenWrt:~# ubus call system board { "kernel": "5.15.102", "hostname": "OpenWrt", "system": "ARMv8 Processor rev 4", "model": "Raspberry Pi 3 Model B Rev 1.2", "board_name": "raspberrypi,3-model-b", "rootfs_type": "ext4", "release": { "distribution": "OpenWrt", "version": "SNAPSHOT", "revision": "r22371-0eebc6f0dd", "target": "bcm27xx/bcm2710", "description": "OpenWrt SNAPSHOT r22371-0eebc6f0dd" } } root@OpenWrt:~# ubus call network.device status '{"name": "eth0"}' { "external": false, "present": true, "type": "Network device", "up": true, "carrier": true, "auth_status": false, "link-advertising": [ "10baseT-H", "10baseT-F", "100baseT-H", "100baseT-F" ], "link-partner-advertising": [ "10baseT-H", "10baseT-F", "100baseT-H", "100baseT-F" ], "link-supported": [ "10baseT-H", "10baseT-F", "100baseT-H", "100baseT-F" ], "speed": "100F", "autoneg": true, "hw-tc-offload": false, "devtype": "ethernet", "mtu": 1500, "mtu6": 1500, "macaddr": "b8:27:eb:b8:6b:03", "txqueuelen": 1000, "ipv6": true, "ip6segmentrouting": false, "promisc": false, "rpfilter": 0, "acceptlocal": false, "igmpversion": 0, "mldversion": 0, "neigh4reachabletime": 30000, "neigh6reachabletime": 30000, "neigh4gcstaletime": 60, "neigh6gcstaletime": 60, "neigh4locktime": 100, "dadtransmits": 1, "multicast": true, "sendredirects": true, "drop_v4_unicast_in_l2_multicast": false, "drop_v6_unicast_in_l2_multicast": false, "drop_gratuitous_arp": false, "drop_unsolicited_na": false, "arp_accept": false, "statistics": { "collisions": 0, "rx_frame_errors": 0, "tx_compressed": 0, "multicast": 0, "rx_length_errors": 0, "tx_dropped": 0, "rx_bytes": 1354728, "rx_missed_errors": 0, "tx_errors": 0, "rx_compressed": 0, "rx_over_errors": 0, "tx_fifo_errors": 0, "rx_crc_errors": 0, "rx_packets": 2140, "tx_heartbeat_errors": 0, "rx_dropped": 0, "tx_aborted_errors": 0, "tx_packets": 1762, "rx_errors": 0, "tx_bytes": 487287, "tx_window_errors": 0, "rx_fifo_errors": 0, "tx_carrier_errors": 0 } } root@OpenWrt:~# ubus call dnsmasq metrics { "dns_cache_inserted": 274, "dns_cache_live_freed": 0, "dns_queries_forwarded": 124, "dns_auth_answered": 0, "dns_local_answered": 82, "dns_stale_answered": 0, "dns_unanswered": 1, "bootp": 0, "pxe": 0, "dhcp_ack": 1, "dhcp_decline": 0, "dhcp_discover": 1, "dhcp_inform": 0, "dhcp_nak": 0, "dhcp_offer": 1, "dhcp_release": 0, "dhcp_request": 1, "noanswer": 0, "leases_allocated_4": 1, "leases_pruned_4": 0, "leases_allocated_6": 0, "leases_pruned_6": 0 }
root@OpenWrt:~# ubus monitor -> 43fa907f #00000003 status: {"status":0} ↑前回までのmonitorコマンドの実行結果。↓がモニタ内容。 [ubus call system board]のモニタリング内容 -> 517099f6 #517099f6 hello: {} <- 517099f6 #00000000 lookup: {"objpath":"system"} -> 517099f6 #00000000 data: {"objpath":"system","objid":-1792756799,"objtype":620610073,"signature":{"board":{},"info":{},"reboot":{},"watchdog":{"frequency":5,"timeout":5,"magicclose":7,"stop":7},"signal":{"pid":5,"signum":5},"validate_firmware_image":{"path":3},"sysupgrade":{"path":3,"force":7,"backup":3,"prefix":3,"command":3,"options":2}}} -> 517099f6 #00000000 status: {"status":0} <- 517099f6 #9524b3c1 invoke: {"objid":-1792756799,"method":"board","data":{}} -> db052ea0 #517099f6 invoke: {"objid":-1792756799,"method":"board","data":{},"user":"root","group":"root"} <- db052ea0 #517099f6 data: {"objid":-1792756799,"data":{"kernel":"5.15.102","hostname":"OpenWrt","system":"ARMv8 Processor rev 4","model":"Raspberry Pi 3 Model B Rev 1.2","board_name":"raspberrypi,3-model-b","rootfs_type":"ext4","release":{"distribution":"OpenWrt","version":"SNAPSHOT","revision":"r22371-0eebc6f0dd","target":"bcm27xx/bcm2710","description":"OpenWrt SNAPSHOT r22371-0eebc6f0dd"}}} -> 517099f6 #9524b3c1 data: {"objid":-1792756799,"data":{"kernel":"5.15.102","hostname":"OpenWrt","system":"ARMv8 Processor rev 4","model":"Raspberry Pi 3 Model B Rev 1.2","board_name":"raspberrypi,3-model-b","rootfs_type":"ext4","release":{"distribution":"OpenWrt","version":"SNAPSHOT","revision":"r22371-0eebc6f0dd","target":"bcm27xx/bcm2710","description":"OpenWrt SNAPSHOT r22371-0eebc6f0dd"}}} <- db052ea0 #517099f6 status: {"status":0,"objid":-1792756799} -> 517099f6 #9524b3c1 status: {"status":0,"objid":-1792756799} [ubus call network.device status '{"name": "eth0"}']のモニタリング内容 -> 4c75ad13 #4c75ad13 hello: {} <- 4c75ad13 #00000000 lookup: {"objpath":"network.device"} -> 4c75ad13 #00000000 data: {"objpath":"network.device","objid":1650086866,"objtype":909749173,"signature":{"status":{"name":3},"set_alias":{"alias":1,"device":3},"set_state":{"name":3,"defer":7,"auth_status":7},"stp_init":{}}} -> 4c75ad13 #00000000 status: {"status":0} <- 4c75ad13 #625a53d2 invoke: {"objid":1650086866,"method":"status","data":{"name":"eth0"}} -> 43024ada #4c75ad13 invoke: {"objid":1650086866,"method":"status","data":{"name":"eth0"},"user":"root","group":"root"} <- 43024ada #4c75ad13 data: {"objid":1650086866,"data":{"external":false,"present":true,"type":"Network device","up":true,"carrier":true,"auth_status":false,"link-advertising":["10baseT-H","10baseT-F","100baseT-H","100baseT-F"],"link-partner-advertising":["10baseT-H","10baseT-F","100baseT-H","100baseT-F"],"link-supported":["10baseT-H","10baseT-F","100baseT-H","100baseT-F"],"speed":"100F","autoneg":true,"hw-tc-offload":false,"devtype":"ethernet","mtu":1500,"mtu6":1500,"macaddr":"b8:27:eb:b8:6b:03","txqueuelen":1000,"ipv6":true,"ip6segmentrouting":false,"promisc":false,"rpfilter":0,"acceptlocal":false,"igmpversion":0,"mldversion":0,"neigh4reachabletime":30000,"neigh6reachabletime":30000,"neigh4gcstaletime":60,"neigh6gcstaletime":60,"neigh4locktime":100,"dadtransmits":1,"multicast":true,"sendredirects":true,"drop_v4_unicast_in_l2_multicast":false,"drop_v6_unicast_in_l2_multicast":false,"drop_gratuitous_arp":false,"drop_unsolicited_na":false,"arp_accept":false,"statistics":{"collisions":0,"rx_frame_errors":0,"tx_compressed":0,"multicast":0,"rx_length_errors":0,"tx_dropped":0,"rx_bytes":1354728,"rx_missed_errors":0,"tx_errors":0,"rx_compressed":0,"rx_over_errors":0,"tx_fifo_errors":0,"rx_crc_errors":0,"rx_packets":2140,"tx_heartbeat_errors":0,"rx_dropped":0,"tx_aborted_errors":0,"tx_packets":1762,"rx_errors":0,"tx_bytes":487287,"tx_window_errors":0,"rx_fifo_errors":0,"tx_carrier_errors":0}}} -> 4c75ad13 #625a53d2 data: {"objid":1650086866,"data":{"external":false,"present":true,"type":"Network device","up":true,"carrier":true,"auth_status":false,"link-advertising":["10baseT-H","10baseT-F","100baseT-H","100baseT-F"],"link-partner-advertising":["10baseT-H","10baseT-F","100baseT-H","100baseT-F"],"link-supported":["10baseT-H","10baseT-F","100baseT-H","100baseT-F"],"speed":"100F","autoneg":true,"hw-tc-offload":false,"devtype":"ethernet","mtu":1500,"mtu6":1500,"macaddr":"b8:27:eb:b8:6b:03","txqueuelen":1000,"ipv6":true,"ip6segmentrouting":false,"promisc":false,"rpfilter":0,"acceptlocal":false,"igmpversion":0,"mldversion":0,"neigh4reachabletime":30000,"neigh6reachabletime":30000,"neigh4gcstaletime":60,"neigh6gcstaletime":60,"neigh4locktime":100,"dadtransmits":1,"multicast":true,"sendredirects":true,"drop_v4_unicast_in_l2_multicast":false,"drop_v6_unicast_in_l2_multicast":false,"drop_gratuitous_arp":false,"drop_unsolicited_na":false,"arp_accept":false,"statistics":{"collisions":0,"rx_frame_errors":0,"tx_compressed":0,"multicast":0,"rx_length_errors":0,"tx_dropped":0,"rx_bytes":1354728,"rx_missed_errors":0,"tx_errors":0,"rx_compressed":0,"rx_over_errors":0,"tx_fifo_errors":0,"rx_crc_errors":0,"rx_packets":2140,"tx_heartbeat_errors":0,"rx_dropped":0,"tx_aborted_errors":0,"tx_packets":1762,"rx_errors":0,"tx_bytes":487287,"tx_window_errors":0,"rx_fifo_errors":0,"tx_carrier_errors":0}}} <- 43024ada #4c75ad13 status: {"status":0,"objid":1650086866} -> 4c75ad13 #625a53d2 status: {"status":0,"objid":1650086866} [ubus call dnsmasq metrics]のモニタリング内容 -> b4c77460 #b4c77460 hello: {} <- b4c77460 #00000000 lookup: {"objpath":"dnsmasq"} -> b4c77460 #00000000 data: {"objpath":"dnsmasq","objid":-387274241,"objtype":-761337583,"signature":{"metrics":{}}} -> b4c77460 #00000000 status: {"status":0} <- b4c77460 #e8eaa9ff invoke: {"objid":-387274241,"method":"metrics","data":{}} -> 22024e15 #b4c77460 invoke: {"objid":-387274241,"method":"metrics","data":{},"user":"root","group":"root"} <- 22024e15 #b4c77460 data: {"objid":-387274241,"data":{"dns_cache_inserted":274,"dns_cache_live_freed":0,"dns_queries_forwarded":124,"dns_auth_answered":0,"dns_local_answered":82,"dns_stale_answered":0,"dns_unanswered":1,"bootp":0,"pxe":0,"dhcp_ack":1,"dhcp_decline":0,"dhcp_discover":1,"dhcp_inform":0,"dhcp_nak":0,"dhcp_offer":1,"dhcp_release":0,"dhcp_request":1,"noanswer":0,"leases_allocated_4":1,"leases_pruned_4":0,"leases_allocated_6":0,"leases_pruned_6":0}} -> b4c77460 #e8eaa9ff data: {"objid":-387274241,"data":{"dns_cache_inserted":274,"dns_cache_live_freed":0,"dns_queries_forwarded":124,"dns_auth_answered":0,"dns_local_answered":82,"dns_stale_answered":0,"dns_unanswered":1,"bootp":0,"pxe":0,"dhcp_ack":1,"dhcp_decline":0,"dhcp_discover":1,"dhcp_inform":0,"dhcp_nak":0,"dhcp_offer":1,"dhcp_release":0,"dhcp_request":1,"noanswer":0,"leases_allocated_4":1,"leases_pruned_4":0,"leases_allocated_6":0,"leases_pruned_6":0}} <- 22024e15 #b4c77460 status: {"status":0,"objid":-387274241} -> b4c77460 #e8eaa9ff status: {"status":0,"objid":-387274241}
ネットワークを経由して外部デバイスからOpenWrtのUBUSサーバーアプリケーションに実行要求を出すことも可能です。
これを実現するにはRemote Procedure Call (RPC)と呼ばれる技術を利用します。OpenWrtではuhttpd-mod-ubusと呼ばれるプラグインモジュールをインストールすることで利用できるようになります。
そのため、uhhtpd-mod-ubusをインストールした上で対象のUBUSサーバーアプリケーションのAccess Control List (ACL)を作成&適用すればネットワーク上にUBUSメソッドをエンドポイントとして公開することができます。
ここではLuaスクリプトベースのサンプルUBUSサーバーアプリケーションをネットワーク上に公開する方法とその呼び出し方法を具体例と共に紹介します。
UBUSサーバーアプリケーションとして機能するスクリプトの作成・適用・公開まで全て詳細に取り上げますのでご参考ください。.......というか、ここだけで独立した記事にできるのは気のせい?
ここでの説明はOpenWrtのコンソールを通してUBUSサーバースクリプトを作成&適用することを前提にしています。 もちろん、スクリプトなどを他PC上で作成してからSCPコマンドなどでアップロードする方法もOKです。
始めにviでエディタを開き、以下のubus-rpc-sampleを/usr/libexec/rpcd上に作成します。
ubus-rpc-sampleの作成
root@OpenWrt:~# vi /usr/libexec/rpcd/ubus-rpc-sample
ubus-rpc-sampleの内容
#!/usr/bin/env lua
local jsonc = require("luci.jsonc")
local methods = {
sampleA = {
call = function()
local r = {}
local response = {}
response.contents = "Hello"
r.result = jsonc.stringify(response, false)
return r
end
},
sampleB = {
args = { data = "a_string" },
call = function(args)
local r = {}
local response = {}
response.contents = "Your Input Data: " .. args.data
r.result = jsonc.stringify(response, false)
return r
end
},
sampleC = {
args = { hostname = "a_string" },
call = function(args)
local uci = require("luci.model.uci").cursor()
uci:set("system", "@system[0]", "hostname", args.hostname)
uci:commit("system")
local r = {}
local response = {}
response.contents = "OK"
r.result = jsonc.stringify(response, false)
return r
end
}
}
local function parseInput()
local parse = jsonc.new()
local done, err
while true do
local chunk = io.read(4096)
if not chunk then
break
elseif not done and not err then
done, err = parse:parse(chunk)
end
end
if not done then
print(jsonc.stringify({
error = err or "Incomplete input for argument parsing"
}))
os.exit(1)
end
return parse:get()
end
-- validation
local function validateArgs(func, uargs)
local method = methods[func]
if not method then
print(jsonc.stringify({error = "Method not found in methods table"}))
os.exit(1)
end
local n = 0
for _, _ in pairs(uargs) do n = n + 1 end
if method.args and n == 0 then
print(jsonc.stringify({
error = "Received empty arguments for " .. func ..
" but it requires " .. jsonc.stringify(method.args)
}))
os.exit(1)
end
uargs.ubus_rpc_session = nil
local margs = method.args or {}
for k, v in pairs(uargs) do
if margs[k] == nil or (v ~= nil and type(v) ~= type(margs[k])) then
print(jsonc.stringify({
error = "Invalid argument '" .. k .. "' for " .. func ..
" it requires " .. jsonc.stringify(method.args)
}))
os.exit(1)
end
end
return method
end
-- ubus list & call
if arg[1] == "list" then
local _, rv = nil, {}
for _, method in pairs(methods) do rv[_] = method.args or {} end
print((jsonc.stringify(rv):gsub(":%[%]", ":{}")))
elseif arg[1] == "call" then
local args = parseInput()
local method = validateArgs(arg[2], args)
local run = method.call(args)
print(run.result)
os.exit(run.code or 0)
end
上記のスクリプトが書き終わったらchmodで実行権限を付与したら完了です。
root@OpenWrt:~# chmod +x /usr/libexec/rpcd/ubus-rpc-sample
後はserviceコマンドでrpcdを再起動すればシステムがubus-rpc-sampleを新たなUBUSサーバーアプリケーションとして認識します。ここまでの作業が成功すれば、ubus listコマンドでubus-rpc-sampleが認識されていることが確認できます。
root@OpenWrt:~# service rpcd restart root@OpenWrt:~# ubus -v list ubus-rpc-sample 'ubus-rpc-sample' @e7ee78bd "sampleA":{} "sampleB":{"data":"String"} "sampleC":{"hostname":"String"}
これにより、次のコマンドでubus-rpc-sampleの各メソッドが実行できます。
sampleAメソッド
root@OpenWrt:~# ubus call ubus-rpc-sample sampleA
{
"contents": "Hello"
}
sampleBメソッド
root@OpenWrt:~# ubus call ubus-rpc-sample sampleB '{"data":"Good Bye!!"}'
{
"contents": "Your Input Data: Good Bye!!"
}
sampleCメソッド
root@OpeWrt:~# ubus call ubus-rpc-sample sampleC '{"hostname":"OpenWrt"}'
{
"contents": "OK"
}
次はRPCを制御するuhttpd-mod-ubusをインストールします。
root@OpenWrt:~# opkg update root@OpenWrt:~# opkg install uhttpd-mod-ubus
これにより、RPCを介して上記のUBUSサーバーアプリケーションを実行するための環境が構築されました。
次に公開したいUBUSサーバーアプリのACLファイルを作成します。 ACLファイルはjson形式で書く必要があり、次のフォーマットに従って記述します。
{
<acl name>: {
"description": "This is sample ubus method",
"write": {
"ubus": {
<ubus server name>: [<ubus method>]
}
}
"read": {
"ubus": {
<ubus server name>: [<ubus method>]
}
}
}
}
上記のフォーマットに従ったACLファイル(json)を作成して/usr/share/rpcd/acl.dに配置します。
sample.jsonの作成
root@OpenWrt:~# vi /usr/share/rpcd/acl.d/sample.json
sample.jsonの内容
{
"sample": {
"description": "This is sample ubus method",
"write": {
"ubus": {
"ubus-rpc-sample": ["sampleC"]
}
}
"read": {
"ubus": {
"ubus-rpc-sample": ["sampleA", "sampleB"]
}
}
}
}
保存が出来たら次のserviceコマンドでrpcdを再起動します。
root@OpenWrt:~# service rpcd restart
ネットワークを介してUBUSサーバーアプリケーション(ubus-rpc-sample)の各メソッドを実行する準備が全て整いました。
今回は外部デバイスからcurlコマンドを使ってubus-rpc-sampleの各メソッドを実行します。
まず、RPCを利用するにはOpenWrtデバイス(ルーター)にログインする必要があります。
通常、ログインをするにはcurlコマンドで以下のjsonを送信します。
※今回、私はUbuntu環境のPCで実施しました。
kamo@kamo:~ $ curl -H 'Content-Type: application/json' -d '{ "jsonrpc": "2.0", "id": 1, "method": "call", "params": [ "00000000000000000000000000000000", "session", "login", { "username": "root", "password": "12345678" } ] }' http://192.168.1.1/ubus
上記の例はOpenWrtデバイスのIPアドレスが192.168.1.1/24で、ユーザーID:root、パスワード:12345678でログイン処理を試行したものです。
ログインが成功すると以下のような応答が返ってきます。
{"jsonrpc":"2.0","id":1,"result":[0,{"ubus_rpc_session":"2865b0cfcd219ef165ac9245ae81f9d8","timeout":300,"expires":299,"acls":{"access-group":{"allow-full-uci-access":["read","write"],"luci-app-firewall":["read","write"],"luci-app-package-manager":["read","write"],"luci-base":["read","write"],"luci-base-network-status":["read"],"luci-mod-network-config":["read","write"],"luci-mod-network-dhcp":["read","write"],"luci-mod-network-diagnostics":["read"],"luci-mod-status-channel_analysis":["read"],"luci-mod-status-firewall":["read","write"],"luci-mod-status-index":["read","write"],"luci-mod-status-index-dhcp":["read"],"luci-mod-status-index-dsl":["read"],"luci-mod-status-index-ports":["read"],"luci-mod-status-index-storage":["read"],"luci-mod-status-index-wifi":["read","write"],"luci-mod-status-logs":["read"],"luci-mod-status-processes":["read","write"],"luci-mod-status-realtime":["read"],"luci-mod-status-routes":["read"],"luci-mod-system-config":["read","write"],"luci-mod-system-cron":["read","write"],"luci-mod-system-flash":["read","write"],"luci-mod-system-init":["read","write"],"luci-mod-system-mounts":["read","write"],"luci-mod-system-reboot":["write"],"luci-mod-system-repokeys"
長いので以下省略...
この応答の中にあるセッションID(今回は"ubus_rpc_session":"2865b0cfcd219ef165ac9245ae81f9d8")が以降の通信で必要なのでメモします。
次に今回作成したubus-rpc-sampleの各メソッドを次のようにして呼び出すと処理が実行され応答が返ってきます。
※この時にログイン時のubus_rpc_sessionを使用しますので、以下のコマンド例の該当箇所を置き換えてから実行してください。
sampleAメソッド
curl -H 'Content-Type: application/json' -d '{ "jsonrpc": "2.0", "id": 1, "method": "call", "params": [ "2865b0cfcd219ef165ac9245ae81f9d8", "ubus-rpc-sample", "sampleA", {} ] }' http://192.168.1.1/ubus
sampleBメソッド
curl -H 'Content-Type: application/json' -d '{ "jsonrpc": "2.0", "id": 1, "method": "call", "params": [ "2865b0cfcd219ef165ac9245ae81f9d8", "ubus-rpc-sample", "sampleB", { "data": "Good Bye!!" } ] }' http://192.168.1.1/ubus
sampleCメソッド
curl -H 'Content-Type: application/json' -d '{ "jsonrpc": "2.0", "id": 1, "method": "call", "params": [ "2865b0cfcd219ef165ac9245ae81f9d8", "ubus-rpc-sample", "sampleC", { "hostname": "OpenWrt" } ] }' http://192.168.1.1/ubus
このように、UBUSサーバーアプリケーションはRPCを利用してネットワーク経由で実行要求を受け付けるようにもできます。
セキュリティなどに十分気を付けることが前提ですが、アプリケーション開発の機能として検討しても良いのではないでしょうか?
今回紹介したRPCによるネットワーク経由でのUBUS実行は私が個人開発しているOpenWrt専用AIアシスタント Oasisでも 利用しています。
具体的にはOasisと連携するAndroid用のAIチャットアプリ(Oasis Mobile Client)で使っています。 (仕様はここに書いてあります。)
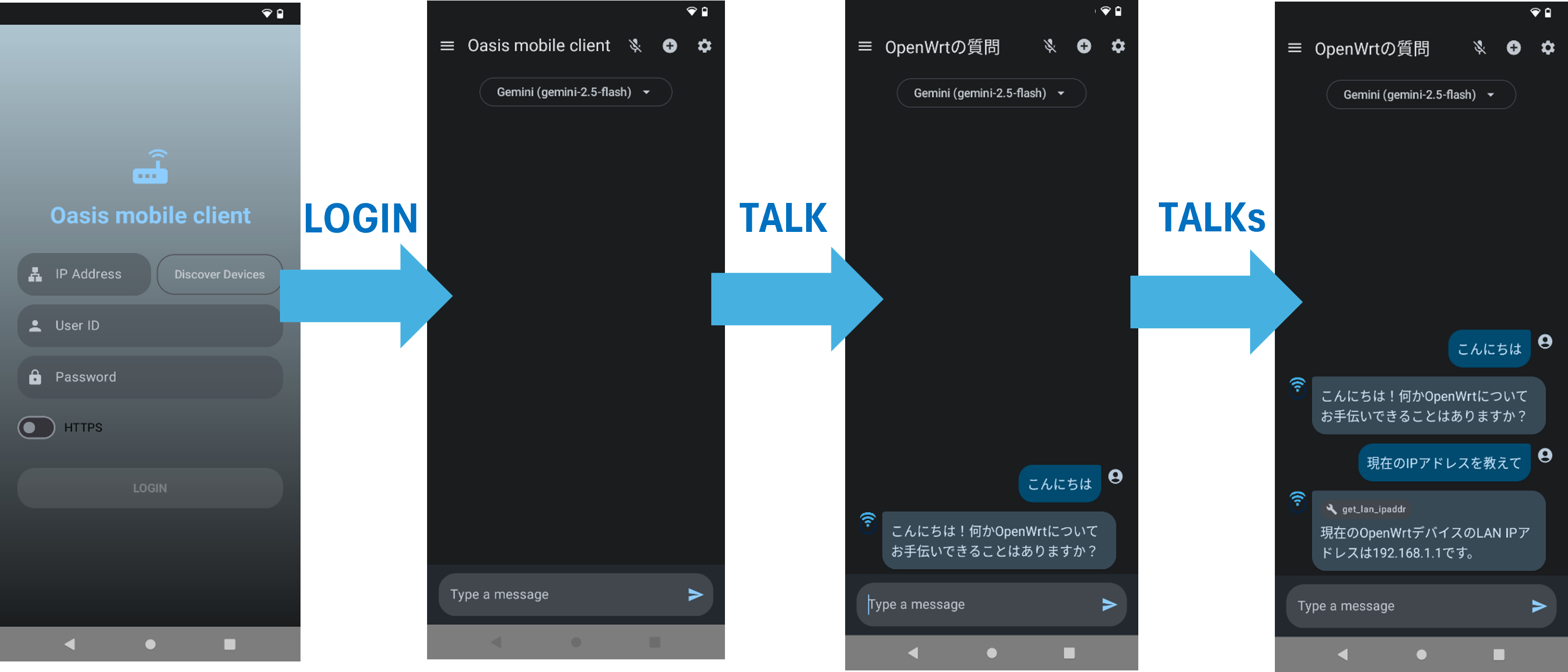
これによって、OpenWrtデバイス(Oasis導入済み)のAIチャット用UBUSサーバーアプリケーションに Androidスマートフォンからユーザーメッセージを送信してAIの応答を受信することができます。
RPC機能を利用した例として参考になれば幸いです。
今回はUBUSコマンドの使い方について説明しました。
正直、UBUSコマンドはエンドユーザーの方にとって、UCIコマンド程の重要度はないと思います。
エンドユーザーとしてOpenWrtの機能を使いたい人にとっては、意識する必要のないコマンドです。 (もちろん、問題対処のためにUBUSについての理解があると良いのは言うまでもありませんが。)
UBUSシステムが提供するIPCと、他モジュールから提供されるRPC(Remote Procedure Call)を組み合わせることで、開発者が実装した 機能をLuCiのWebUIに提供できるようになります。
つまり、UBUSシステムやUBUSコマンドは開発者なら知っておきたい知識です。
今後、関連記事として個人開発したアプリケーション用ページをWebUIのLuCiに組み込み方法について書きたいと思います。 このときに、LuCiとアプリケーション間の通信でUBUSが使用されますので、実際に使用されるケースが理解できるように書きたいと思います。
記事作成に時間が掛かると思いますが、しばらくお持ちください。

2026年版 スマートウォッチの選び方 iPhone・Android別におすすめモデルを紹介
スマートウォッチを初めて選ぶ人向けに、対応スマホ、健康管理、通知、決済、バッテリー、スポーツ機能の違いを整理し、Amazonで購入しやすい代表製品を紹介します。

スキャナーおすすめ5選 書類・写真・本のデジタル化に合う選び方
紙の書類、写真、本をデータ化したい人向けに、ADF、フラットベッド、オーバーヘッド型の違いと5機種の選び方を整理します。

2026年版 アクションカメラおすすめの選び方 初心者向けに主要メー カーを比較
アクションカメラの選び方を初心者向けに解説。4K、手ブレ補正、防水、バッテリー、GoPro・DJI・Insta360・AKASOの代表モデルを紹介します。

ハンドヘルドゲーミングPCとは何か? 代表メーカーと製品を紹介
ハンドヘルドゲーミングPCとは何かを整理し、Steam Deck OLED、ROG Xbox Ally X、Lenovo Legion Go、MSI Claw A1Mなど代表的なメーカー と製品

USB4とは何か? パソコン購入前に知っておきたいポイントを整理
USB4とは何かを、パソコン購入前に知っておきたい人向けに整理します。Thunderbolt 4 / 5との違いや、確認ポイントを分かりやすくまとめて紹介します。

PCストレージ規格を解説! 現行の主流から旧規格まで
PCストレージ規格の基本を整理します。SATAとNVMeの違い、PCIe世代、M.2や2.5インチなどの形状、外付けストレージ規格、HDDとSSDの違い をまとめています。