2026年版 インスタントカメラ・チェキ系ガジェットの選び方 おすすめ10選
昔ながらのフィルム式インスタントカメラと、インスタントデ ジタルカメラ・ハイブリッド機の両方を対象に、チェキ系ガジェ ット10機種を用途別に紹介します。
この記事に掲載しているOpenWrtのパッケージ作成方法は執筆時点で最新のOpenWrt22.03に基づいています。 過去もしくは最新版のOpenWrtではこの記事の内容が当てはまらないかもしれません。予めご了承ください。
この記事では、自作アプリのOpenWrt用パッケージを作成する方法について紹介します。
前回記事で開発したパケットキャプチャソフト(以下、duckdump)を題材に、 対象OpenWrtデバイス用のパッケージを作成、インストールしてみます。
今回は例として、Raspberry Pi3B用のパッケージを作成しますが、 ここで紹介するパッケージ作成方法は、どのOpenWrtデバイスに対しても通用するものです。
そのため、(可能であれば)ご自身のOpenWrtデバイス用にパッケージを作成・インストールしてみることをおススメします。 この作業を通して、この記事の内容について一定の理解をして頂ければ幸いです。
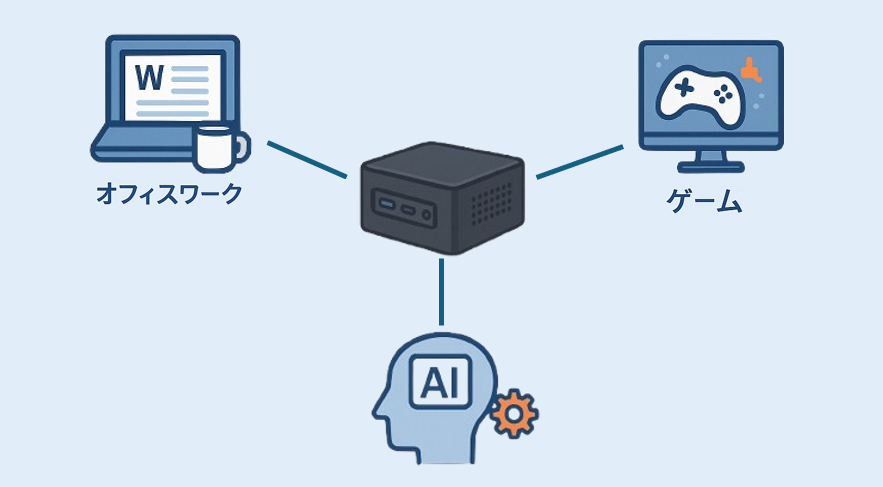
また今回、OpenWrtデバイスのRaspberry Pi3Bにインストールするduckdumpは以下のシステム・機能構成を持ちます。 これはOpenWrt専用アプリケーションの最小機能構成です。
この記事では、パッケージの作成方法のみを取り上げるのではなく、自作アプリをOpenWrt専用アプリケーションとして動作させるための構成方法についても紹介します。 読者の方には、それも含めて参考にして頂ければと思います。
それでは行ってみましょう。
この記事は以下の環境で実施した結果を元に作成しています。
また、記事内で紹介するコンソール表記は次の通りです。
user:~/openwrt$ command
root@OpenWrt:~# command
なお、前提環境として、開発用PCからOpenWrtデバイスにSSH接続できる必要があります。予め確認しておきましょう。 ※OpenWrtをデバイスにインストールしていない、もしくはSSH接続の仕方が不明な方は連載記事の第2回と第3回を参照してください。
今回、OpenWrtデバイスにインストールする自作アプリのduckdumpは、OpenWrtアーキテクチャの1つであるUCIシステム を利用し、キャプチャ対象のNIC名をUCIコンフィグレーションファイル(/etc/config/duckdump)で管理します。
加えて、初期化スクリプト(/etc/init.d/duckdump)をOpenWrt専用初期化プロセス(procd)に認識させることで、システム起動時にduckdumpを自動起動するように設定します。
これにより、初期化スクリプトが提供する次のコマンドを実行することでduckdumpを起動(start)・停止(stop)・再起動(restart)できるようにもなります。
root@OpenWrt:~# /etc/init.d/duckdump start root@OpenWrt:~# /etc/init.d/duckdump stop root@OpenWrt:~# /etc/init.d/duckdump restart
これはちょうど、第3回記事のネットワーク・Wi-Fi設定の適用で使用したコマンド「/etc/init.d/network restart」 に酷似します。つまり、duckdumpはOpenWrtのネットワーク・Wi-Fi制御用アプリケーション(netifd)と同一の機能構成を部分的に持ちます。
ここの作り方が分かれば、OpenWrt専用アプリケーションの開発に興味を持ってくれる方が出てくると思います。
それでは次節からduckdumpのOpenWrt用パッケージを作成するための準備をはじめ、その構成について詳細に見ていきましょう。
前回の記事は、duckdumpのプログラムのみに焦点を当てていたため、掲載ソースコード をそのままコピペして作業を進めても支障はありませんでした。
しかし、今回はパッケージ作成のための設定ファイルが複数ありますので、次のようにGitコマンドを使用して、duckdumpが収録されたUtakamoStudyAppsリポジトリをクローンしてください。 ※クローンする場所は、ユーザーホームディレクトリの好きな場所で構いません。リポジトリの配置場所について特段の制約はありません。
kamo@kamo:~$ git clone https://github.com/utakamo/UtakamoStudyApps.git
UtakamoStudyAppsリポジトリは、次に示すディレクトリ構成で各設定ファイルを管理しています。
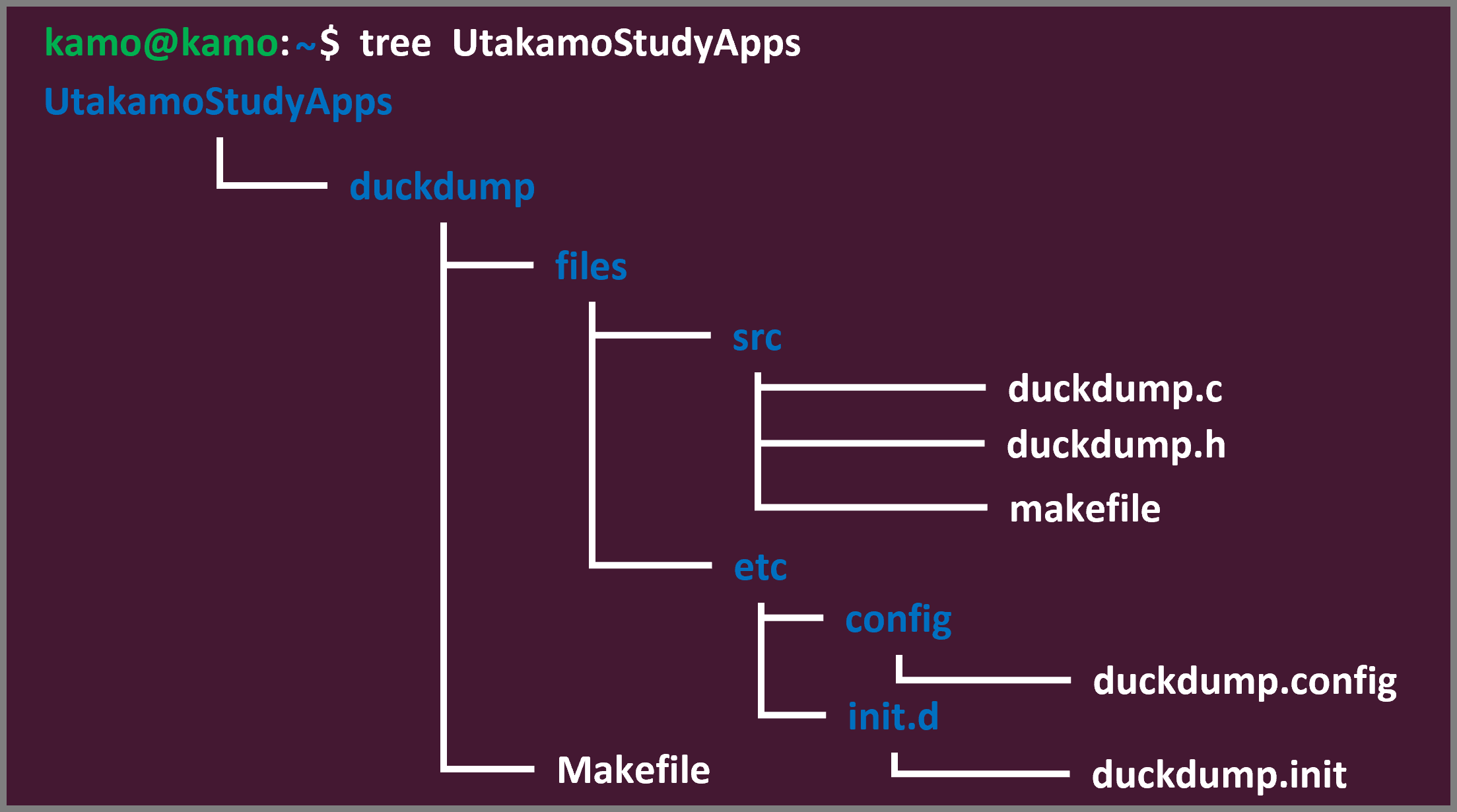
この中でも特に重要なディレクトリとファイルの説明は以下の通りです。
これらのディレクトリ・ファイル構成はテキトーに考えているのではなく、パッケージが正しく作成されるように 各ファイルを階層化して管理しています。これを基に、buildrootが使用するMakeファイル(UtakamoStudyApps/duckdump/Makefile) に、各ディレクトリのファイルを処理するコードを記載することでパッケージの作成を実現します。
そのため、以後はこのディレクトリとファイル構成に変更を加えてはいけません。
次節では、各ファイルの詳細について説明します。
この節では、duckdumpの各パッケージ構成ファイルについて詳細に見ていきます。
ただし、C言語ソースファイルに関しては、前回記事で取り上げていますので省略します。
注意
ここに掲載した各ソースファイルのコードを自身の環境に直接コピペし、次節で紹介するビルド作業に利用してはいけません。
タブ文字やスペース文字が崩れることで、Makeファイルを中心にエラーが発生します。
そのため、これらのソースファイルは前節で紹介したGitHubリポジトリ(UtakamoStudyApps)から入手してください。
all: duckdump
CC = gcc
CFLAGS = -Wall
LDFLAGS = -lpcap
DEPS = $(wildcard *.h)
SRC = $(wildcard *.c)
OBJ = $(patsubst %.c, %.o, $(SRC))
%.o: %.c $(DEPS)
$(CC) -c -o $@ $< $(CFLAGS)
datacheck: $(OBJ)
$(CC) -o $@ $^ $(LDFLAGS)
.PHONY: clean
clean:
rm -f duckdump *.o
include $(TOPDIR)/rules.mk
PKG_NAME:=duckdump
PKG_VERSION:=1.0
PKG_RELEASE:=1
SOURCE_DIR:=./files/src
PKG_BUILD_DIR:=$(BUILD_DIR)/$(PKG_NAME)$(PKG_VERSION)-$(PKG_RELEASE)
#Default PKG_BUILD_DIR
#PKG_BUILD_DIR:=$(BUILD_DIR)/$(PKG_NAME)
DEPENDS:=+libpcap
TARGET_LDFLAGS+=-lpcap
include $(INCLUDE_DIR)/package.mk
define Package/duckdump
CATEGORY:=utakamo
SECTION:=utakamo
TITLE:=utakamo packet capture
endef
define Package/duckdump/description
ipv4 packet capture
endef
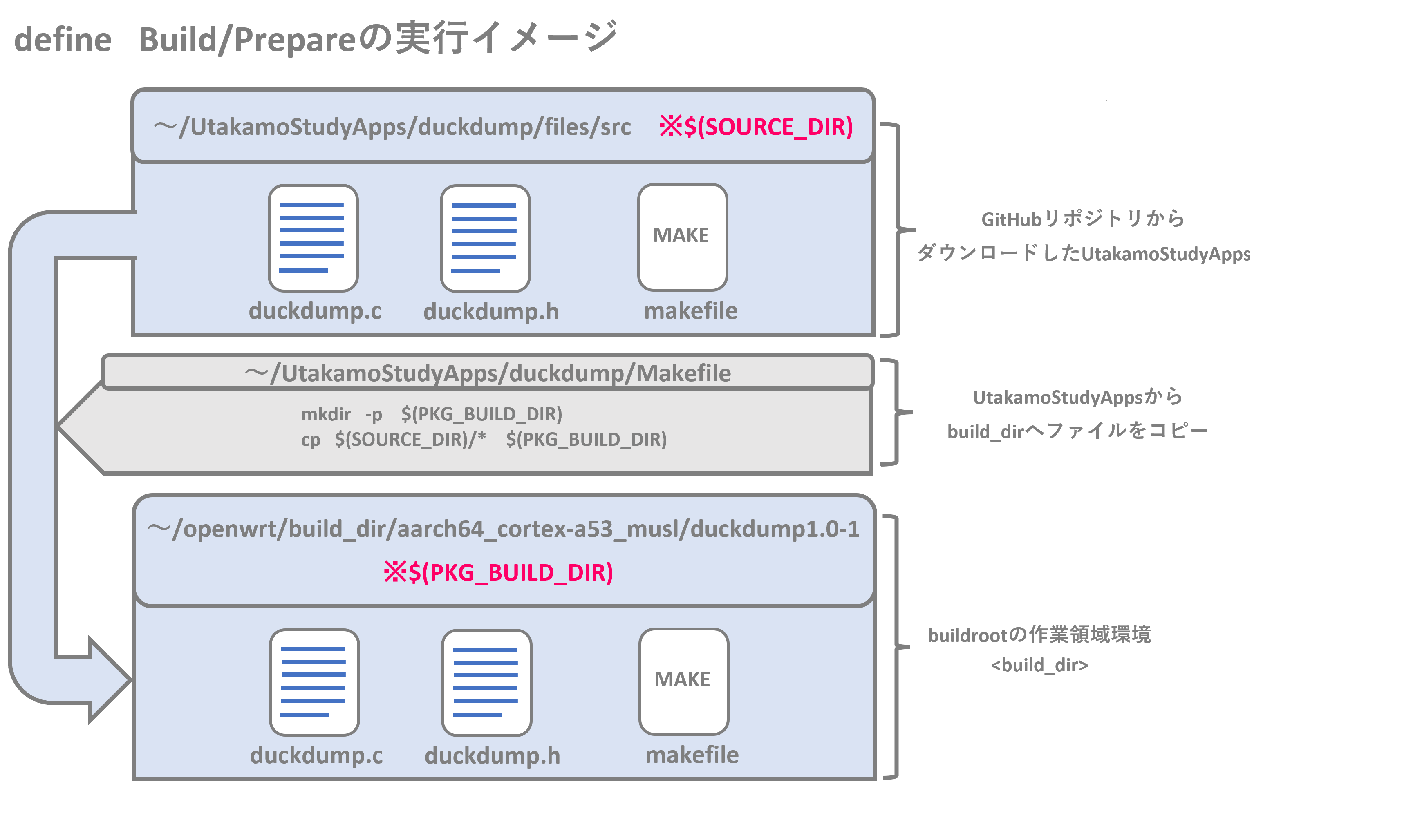
#copy src file from duckdump_dir to build_dir
define Build/Prepare
mkdir -p $(PKG_BUILD_DIR)
cp $(SOURCE_DIR)/* $(PKG_BUILD_DIR)
endef
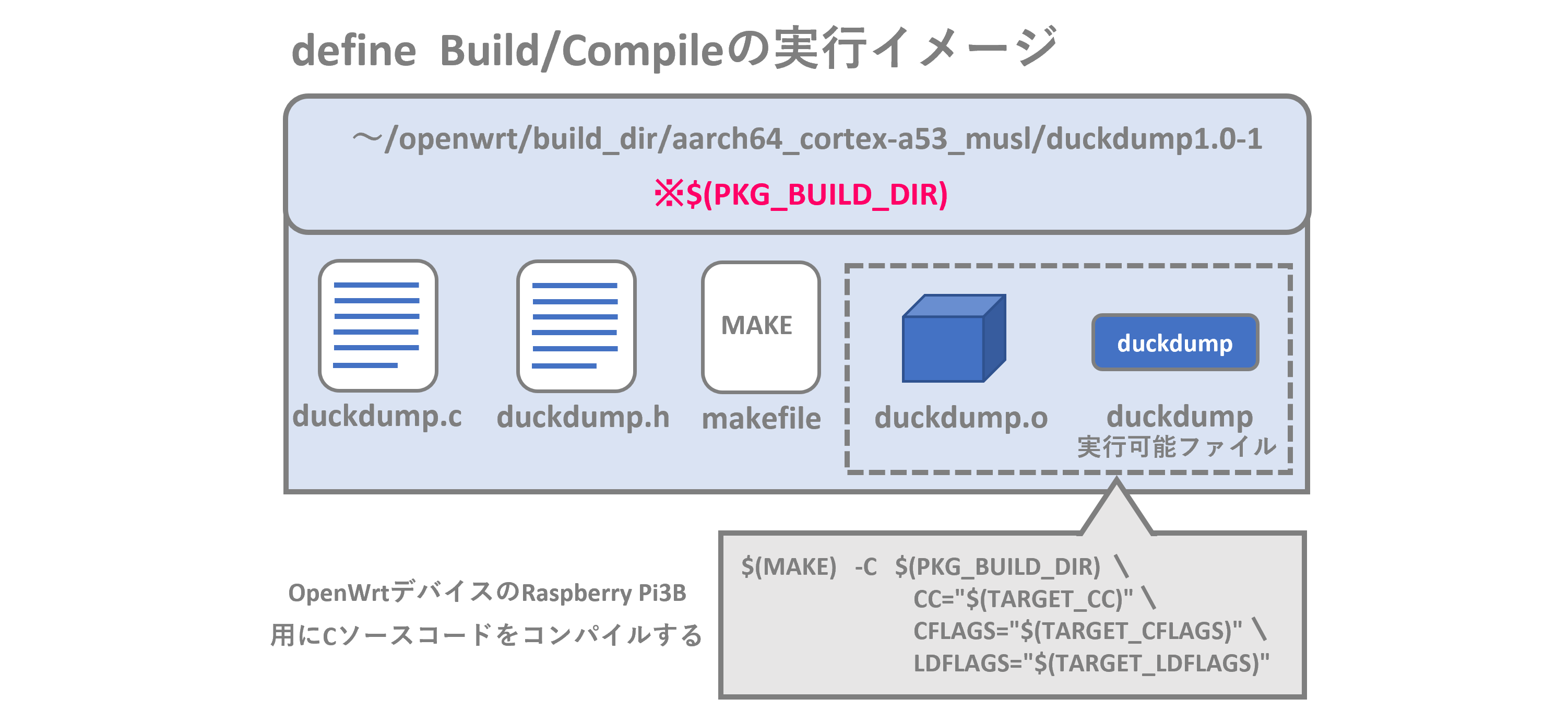
define Build/Compile
$(MAKE) -C $(PKG_BUILD_DIR) \
CC="$(TARGET_CC)" \
CFLAGS="$(TARGET_CFLAGS)" \
LDFLAGS="$(TARGET_LDFLAGS)"
endef
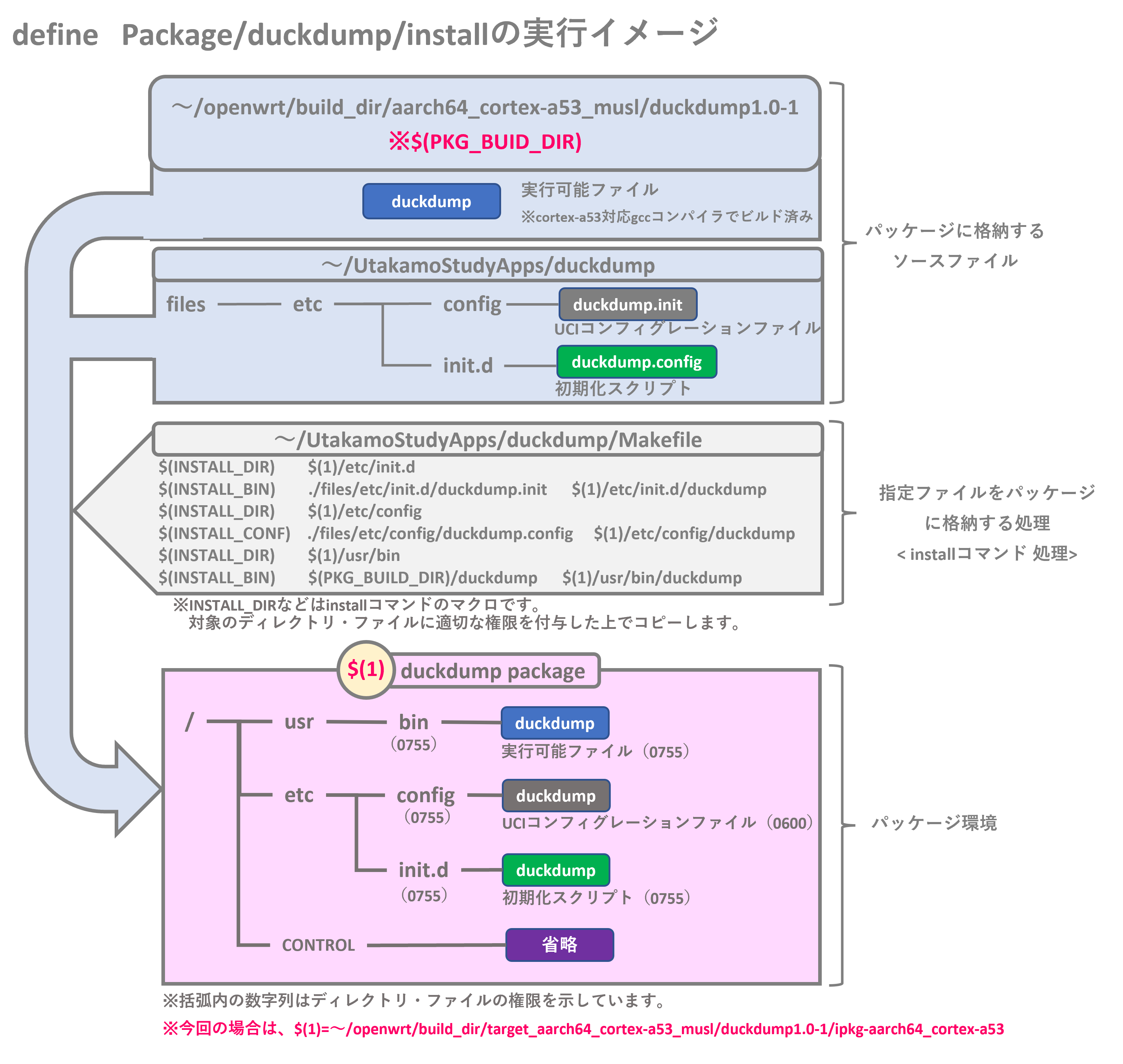
define Package/duckdump/install
$(INSTALL_DIR) $(1)/etc/init.d
$(INSTALL_BIN) ./files/etc/init.d/duckdump.init $(1)/etc/init.d/duckdump
$(INSTALL_DIR) $(1)/etc/config
$(INSTALL_CONF) ./files/etc/config/duckdump.config $(1)/etc/config/duckdump
$(INSTALL_DIR) $(1)/usr/bin
$(INSTALL_BIN) $(PKG_BUILD_DIR)/duckdump $(1)/usr/bin/duckdump
endef
$(eval $(call BuildPackage,duckdump))
| マクロ | 対象コマンド | 説明 |
|---|---|---|
| INSTALL_DIR | install -d -m0755 | アクセス権限0755でディレクトリを作成 |
| INSTALL_BIN | install -m0755 | アクセス権限0755で指定ファイルを作成 |
| INSTALL_DATA | install -m0644 | アクセス権限0644で指定ファイルを作成 |
| INSTALL_CONF | install -m0600 | アクセス権限0600で指定ファイルを作成 |
| 対象ソース | $(1)配下のディレクトリ・ファイル構成 |
|---|---|
| duckdump(実行可能バイナリ) | $1(1)/usr/bin/duckdump |
| UCIコンフィグレーションファイル | $1(1)/etc/config/duckdump |
| 初期化スクリプト | $1(1)/etc/init.d/duckdump |
# duckdump configuration
config duckdump target
option nic wlan0
#!/bin/sh /etc/rc.common
START=99
target=$(uci -q get duckdump.target.nic)
start() {
/usr/bin/duckdump $target
if [ $? -eq 0 ];then
echo "duckdump start [target: ${target}]"
else
echo 'duckdump error'
fi
}
stop() {
killall /usr/bin/duckdump
echo 'duckdump stop'
}
restart() {
stop > /dev/null
sleep 1
start > /dev/null
echo 'duckdump restart'
}
それでは、次節からパッケージを作成していきましょう。
[手順1]:OpenWrt SDKの導入とターゲットデバイス設定
この連載記事の第2回を読んでその内容を既に実施している方は、ここはスキップして下さい。
ここでは、Raspberry Pi3B用のパッケージ作成を紹介します。
そのため、まずは開発用PCにOpenWrt SDKをダウンロードしてください。
ダウンロードされたOpenWrt SDKが管理するbuildrootに対し、ターゲットデバイスとしてRaspberry Pi3Bを指定します。
この内容は第2回で取り上げていますので、次に示すリンク先を順番に読んで実施してください。
※少し冗長ですが、今回は上記リンクを参考にファームウェアイメージの作成まで実施してください。buildrootはファームウェアイメージを作成する際に 必要なツールなどをリポジトリからダウンロードします。そして、依存関係を解決した上でターゲットデバイス用ファームウェアイメージをビルドします。そのため、インストールしないとは言え、ファームウェアイメージを 一度作って全ての依存関係を解決していた方が後々トラブルが発生しづらくなります。
[手順2]:作成対象パッケージのダウンロード
次のGitコマンドでUtakamoStudyAppsリポジトリをクローンしてください。
kamo@kamo:~$ git clone https://github.com/utakamo/UtakamoStudyApps.git
[手順3]:自作アプリのフィード適用とコンパイル
ここではbuildrootに対して自作アプリのフィード(パッケージ情報のまとまり)を適用する方法について説明します。
はじめに、開発用PCにダウンロードしたOpenWrt SDKのディレクトリ(以下、OpenWrtディレクトリ)直下にfeeds.confという 名前のファイルを作成してください。そして、そのファイル中に「src-link」から始まる行(フィード名とパッケージパス)を次のように記載します。
kamo@kamo:~/openwrt$ touch feeds.conf kamo@kamo:~/openwrt$ nano feeds.conf # feeds.confの記載例 # パッケージパスはご自身の環境を確認の上、記述してください # src-link [フィード名] [パッケージパス] src-link utakamo /home/kamo/UtakamoStudyApps
フィード名は、buildrootが対象フィード情報を認識するための名前です。
注意したいのは、フィード名とパッケージ名は重複していけません。今回の場合、作成対象のパッケージ名はduckdumpなので、
duckdumpとは異なる名前のutakamoをフィード名に指定しています。
パッケージパスとは、buildrootが読み込むMakefileのディレクトリパスです。
親ディレクトリを指定すると、そのディレクトリを基点にその直下を探索、Makeファイルを読み込みます。
今回、私の環境ではUtakamoStudyAppsリポジトリを/home/kamo直下にダウンロードしましたので、buildrootが利用するMakeファイルを管理する 親ディレクトリパス「/home/kamo/UtakamoStudyApps」を指定しています。
上記の記載が完了したら、次のコマンドでbuildrootのフィードリスト(~/openwrt/feeds/packages)にfeeds.confが示すutakamoフィードを登録します。
kamo@kamo:~/openwrt$ ./scripts/feeds update -a
続けて、次のコマンドでbuildrootにutakamoフィードをインストールします。
kamo@kamo:~/openwrt$ ./scripts/feeds install -a -p utakamo
成功すると、~/openwrt/package/feedsにutakamoフィード情報が作成されます。 これにより、buildrootのコンフィグ画面でduckdumpをインストール対象として指定できます。
実際にコンフィグ画面を表示してみましょう。
kamo@kamo:~/openwrt$ make menuconfig
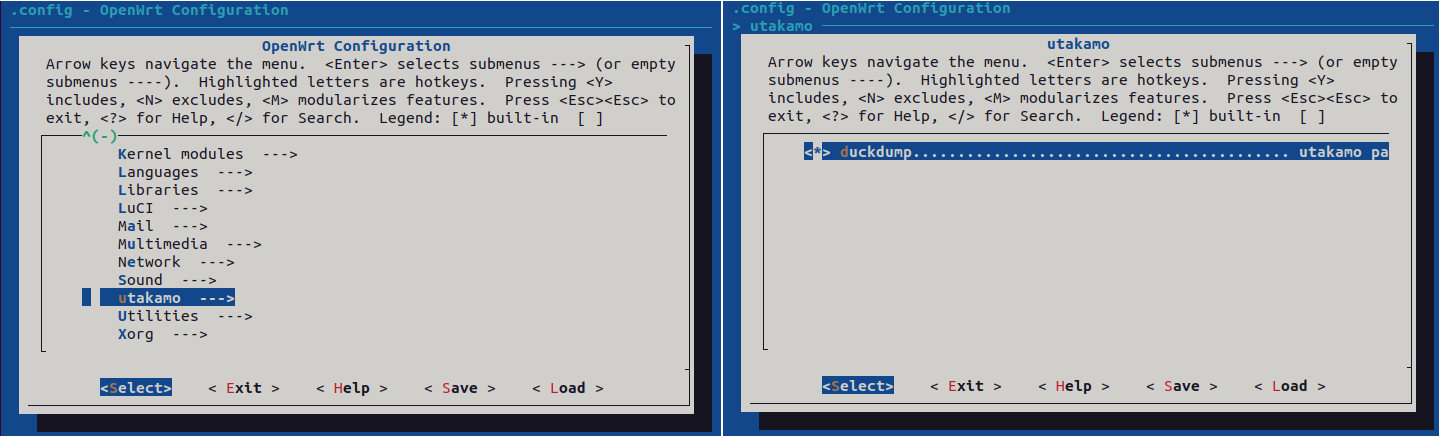
ここまでの作業が正常に出来ていれば、次のようにutakamo項目が表示されるはずです。 表示されていない場合はfeeds.confのパッケージパスが間違っていることがほとんどです。パスが正しいか確認してください。
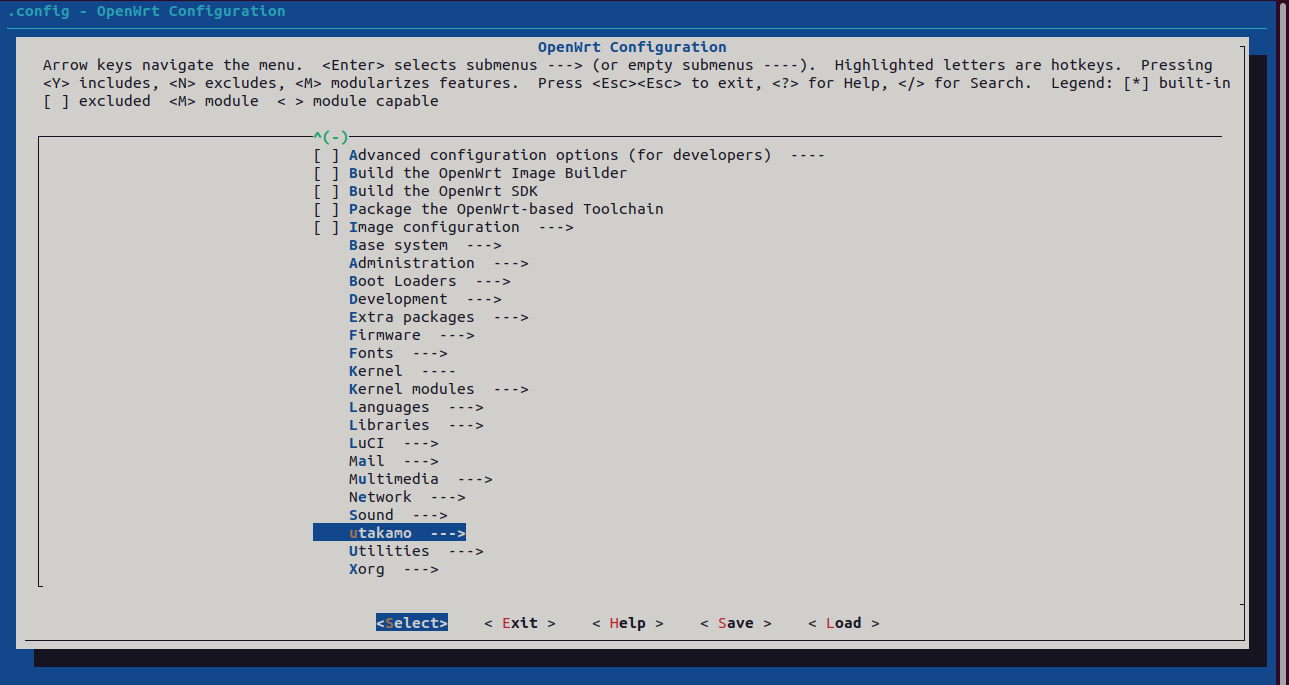
そして、このutakamo項目を選択すると、次にduckdumpパッケージの項目が表示されます。
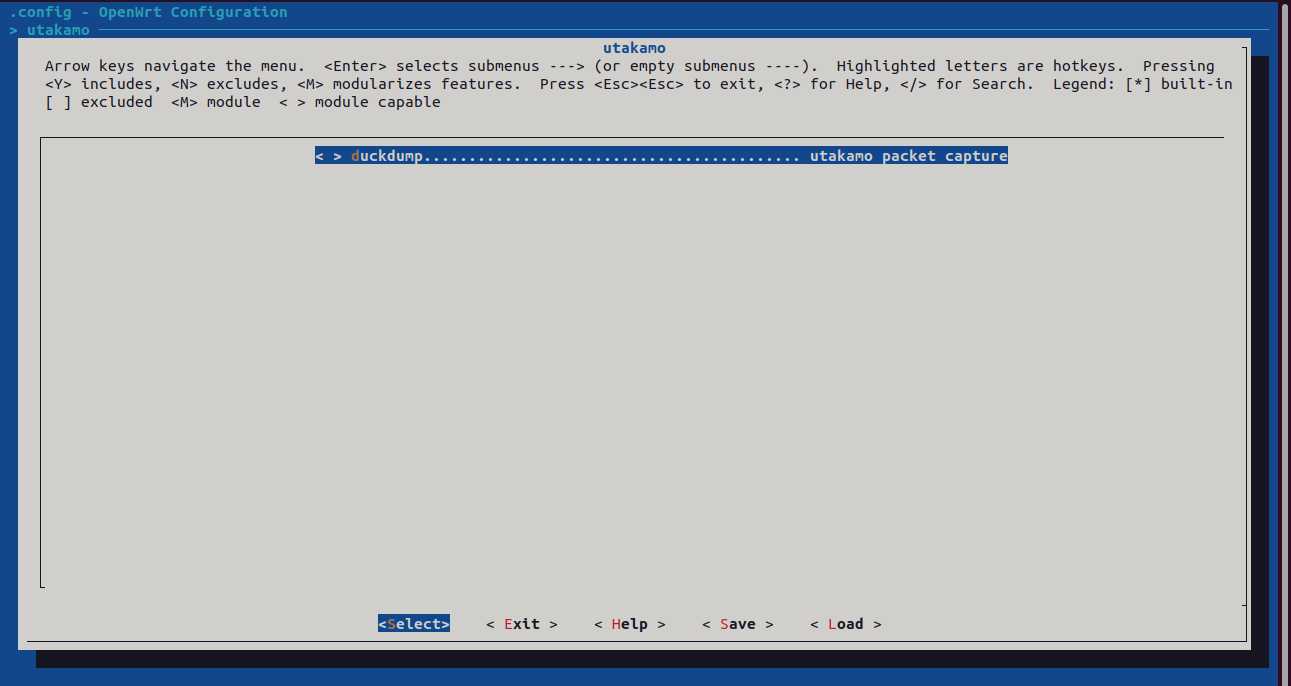
パッケージ項目の確認が済みましたら、duckdump項目にはチェックを入れずにそのままコンフィグ画面を閉じてください。
コンフィグ画面が終了してコンソールに操作が戻りましたら、次のコマンドでbuildrootに作業領域のbuild_dirを準備させます。 ※一度ファームウェアイメージを作成していれば、この処理はすぐに完了します。
kamo@kamo:~/openwrt$ make V=s
これでパッケージ作成に関わる問題は解消されているはずです。
再度、buildrootのコンフィグ画面を表示させ、今度はduckdumpパッケージにチェックを入れて閉じましょう。
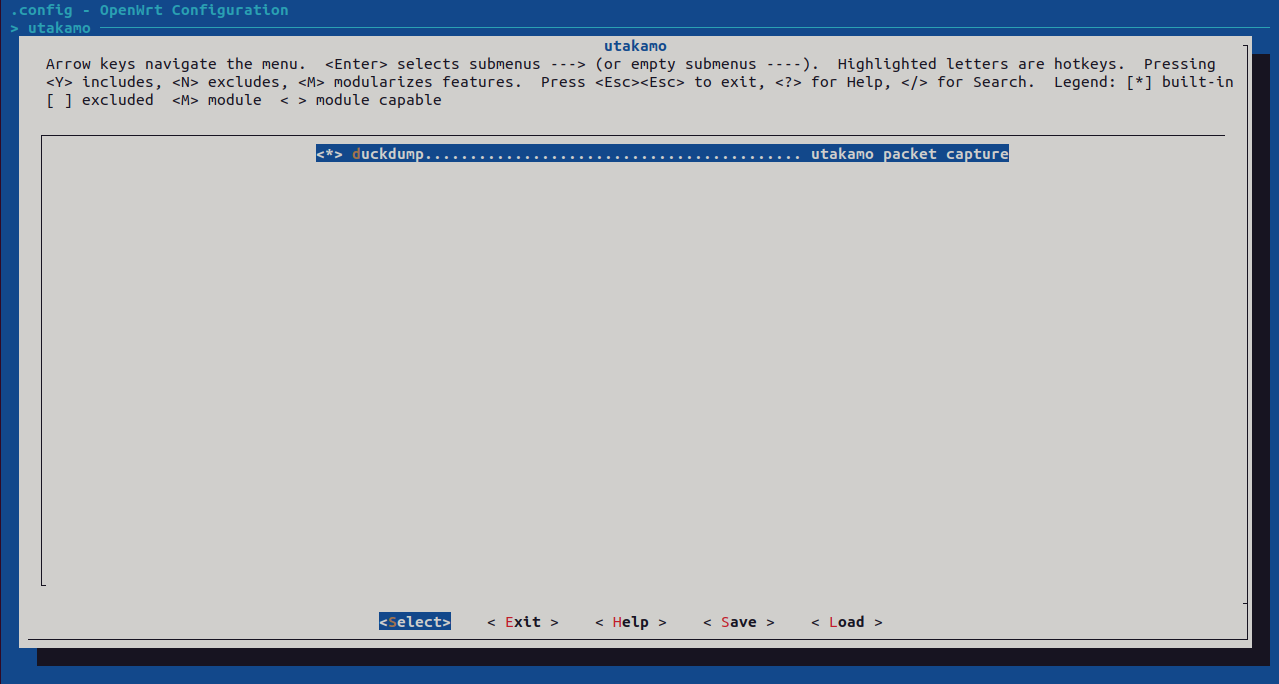
次のコマンドでduckdumpパッケージを作成します。
kamo@kamo:~/openwrt$ make package/duckdump/compile
※2回目以降のパッケージ作成はなるべく上記コマンドでなく、「$ make package/duckdump/{clean,compile}」を使いましょう。
成功すれば、次のようなコンソール結果が表示されます。

これにより、~/openwrt/bin/packages直下のディレクトリにduckdumpパッケージが作成されます。
今回の場合は、~/openwrt/bin/packages/aarch64_cortex-a53/utakamoにduckdumpパッケージのduckdump_1.0-1_aarch64_cortex-a53.ipkが作成されます。

パッケージ作成は以上です。
次節では、このduckdumpパッケージをOpenWrtデバイスにダウンロード&インストールする方法について紹介します。
ここでは、前節で作成したduckdumpパッケージをOpenWrtデバイス上にダウンロードし、パッケージマネージャーソフト(opkg)を使用してインストールする方法について説明します。
はじめに、開発用PC上に存在するduckdumpパッケージ(duckdump_1.0-1_aarch64_cortex-a53.ipk)を 今回のターゲットデバイスであるRaspberry Pi3B上にダウンロードします。
手順はまず、開発用PCのduckdumpパッケージが格納されているディレクトリをドキュメントルートとする簡易WebサーバーをPython3で構築します。
duckdumpパッケージが格納されているディレクトリに移動して、次のコマンドを実行してください。このコマンドは、カレントディレクトリをドキュメントルートとする 簡易Webサーバーを80番ポートで立てる処理です。
kamo@kamo:~/openwrt/bin/packages/aarch64_cortex-a53/utakamo$ sudo python3 -m http.server 80
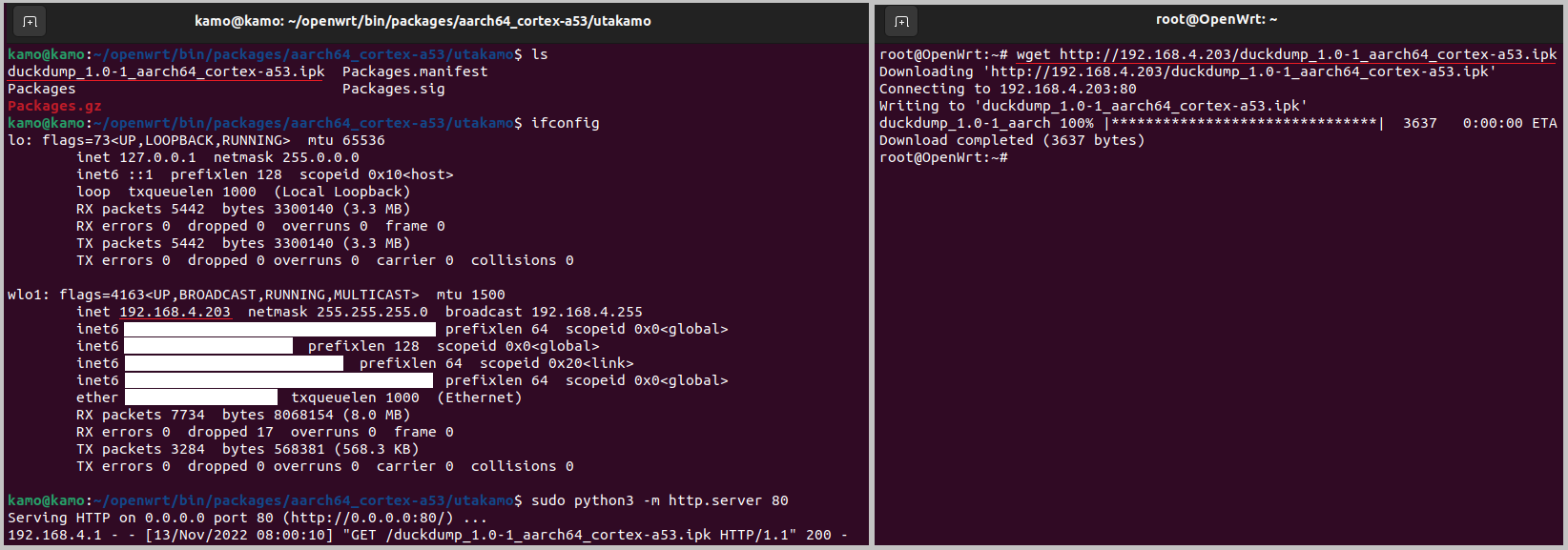
そして次に、開発用PCのIPアドレスとduckdumpパッケージ名から構成されるフルパスを引数に、wgetコマンドをOpenWrtデバイス側で実行します。 今回、私の場合は開発用PCのIPアドレスが192.168.4.203/24でしたので、以下のようにwgetコマンドを実行します。
root@OpenWrt:~# wget http://192.168.4.203/duckdump_1.0-1_aarch64_cortex-a53.ipk
念のため、一連のコマンドを動作させた例を掲載します。
左の開発用PC側コンソールで簡易Webサーバーを動作させつつ、右のOpenWrtデバイス側コンソールでWebサーバー内のduckdumpパッケージをダウンロードします。
補足
お使いのOpenWrtデバイスによっては、wgetコマンド(もしくはcurlコマンド)が使用できない可能性があります。
その場合は、次回記事で紹介するリポジトリ作成を通して、opkg経由からパッケージをダウンロード&インストールしましょう。
パッケージのダウンロードができましたら、後はopkgのinstallコマンドでduckdumpパッケージをインストールします。
root@OpenWrt:~# opkg install duckdump_1.0-1_aarch64_cortex-a53.ipk
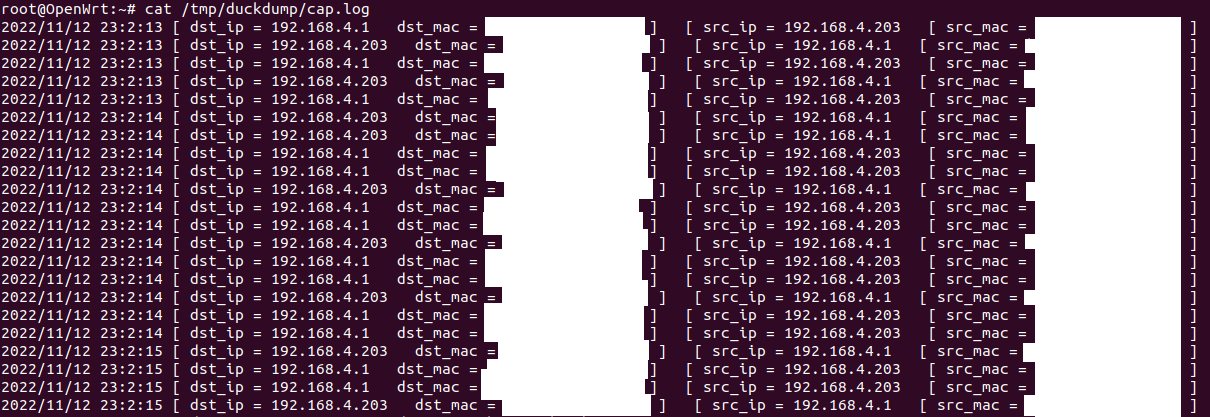
インストールが成功すると、UCIコンフィグレーションファイル(/etc/config/duckdump)によって、引数:wlan0でduckdumpが自動起動します。

youtubeでも表示させ、トラフィックを発生させた後に/tmp/duckdump/cap.logを見ると、wlan0上に流れたIPv4通信の キャプチャログを見ることができます。これで自作アプリduckdumpのインストールは完了です。
なお、duckdumpの初期化スクリプト(/etc/init.d/duckdump)はOpenWrtの初期化プロセス(procd)によって認識されます。 そのため、procdが管理する/etc/rc.dを見ると、S99duckdumpの名前でシンボリックリンクが作成されていることが確認できます。


これで、OpenWrtシステムは起動時に優先順位99番でduckdumpのstart関数を実行するようになります。
以上により、この記事のテーマである自作アプリのパッケージ作成とインストールは全て完了です。
OpenWrtデバイスにインストールしたアプリケーションをアンインストールするには次のコマンドを実行して下さい。
root@OpenWrt:~# opkg remove duckdump
アンインストール時には初期化スクリプトのstop関数が自動実行されますので、duckdumpはパケットキャプチャを停止します。

この記事の冒頭で説明したように、初期化スクリプト(/etc/init.d/duckdump)は操作スクリプトでもあります。 そのため、次のコマンドを使用すると対応した処理が実行できます。
※これは一般的なOpenWrt専用アプリケーションの使用方法と考えて下さい。
[アプリケーションの起動]
startコマンドを実行することで、duckdumpを起動します。
root@OpenWrt:~# /etc/init.d/duckdump start
[アプリケーションの停止]
stopコマンドを実行することで、duckdumpを停止します。
root@OpenWrt:~# /etc/init.d/duckdump stop
[アプリケーションの再起動]
restartコマンドを実行することで、duckdumpを再起動します。
この場合、UCIコンフィグレーションファイル(/etc/config/duckdump)のnicオプションを変更した上で、再起動するケースが考えられます。
root@OpenWrt:~# uci set duckdump.target.nic=eth0 root@OpenWrt:~# /etc/init.d/duckdump restart
[番外][アプリケーションのリロード]
今回開発したduckdumpがサポートしないコマンド(reload)です。
リロードを実現するには、プロセス間通信システム(ubus)と連携する実装がduckdumpに必要です。
リロード機能に対応していれば、duckdumpはプロセスを終了せずにUCIコンフィグレーションファイルを動的に取得・適用することができます。 ※現在のduckdumpはrestartコマンドで、プロセスを再起動することによってUCIコンフィグレーションファイルを読み込み直しています。
OpenWrtのプロセス間通信システムであるubusについては、【第 1 回】 OpenWrt開発入門 イントロダクション-ubusを参照して下さい。
このように、OpenWrt専用アプリケーションは対応する/etc/init.d直下のスクリプト経由で操作が可能です。 しかし、reloadコマンドのように、使用するには他サービスと連携するための実装が必要な場合もあります。
今回は自作アプリのパッケージ作成方法とインストールについて紹介しました。
理解することが多いので、慣れないうちはエラーが頻発すると思います。困ったらこの記事を都度参照してみてください。
なお、今回お試しで用意したMakeファイルなどのパッケージ作成ソースは、開発者がローカル環境内で管理している ソースコードをOpenWrtのbuildrootに適用させてパッケージとしてコンパイルする記述内容です。
本来、他の開発者やOpenWrtユーザーが容易にコンパイルできる形でソースコードを配布する場合は、buildrootがGitリポジトリから パッケージを直接ダウンロードし、その中のソースコードをコンパイルするのが一般的です。なので、Gitリポジトリと直接連携 させるパッケージMakeファイルの書き方やfeeds.confへの適用方法などを紹介した記事をどこかで書きたいと思います。
次回は、パッケージをローカルリポジトリ経由でOpenWrtデバイスにダウンロード・インストールする方法について紹介します。 パッケージのアップグレード方法についても紹介したいと思いますのでよろしくお願いします。

2026年版 インスタントカメラ・チェキ系ガジェットの選び方 おすすめ10選
昔ながらのフィルム式インスタントカメラと、インスタントデ ジタルカメラ・ハイブリッド機の両方を対象に、チェキ系ガジェ ット10機種を用途別に紹介します。
2026年版 はじめてのミニPC おすすめモデル紹介
この記事では「オフィスワーク向け」と「ゲーム&AI向け」の2つの用途に分けて、 はじめてミニPCを購入する方でも選びやすいおすすめモデルを紹介します。

信頼性が売り! 大手・老舗PCメーカーが販売するミニPC 5選
ASUS、マウスコンピューター、Lenovo、HP、MSIから、Amazonで購入できるミニPC5機種を紹介します。CPU、メモリ、ストレージ、拡張性、保証、無線LANの有無を用途別に整理します。

2026年版 目元ケアに使いたい アイウォーマー・アイマッサージャーおすすめ5選
アイウォーマー・アイマッサージャーを初めて選ぶ人向けに、温熱、加圧、タッピング、EMS、装着感、安全性を整理し、代表モデル5機種を紹介します。

2026年版 アクションカメラおすすめの選び方 初心者向けに主要メー カーを比較
アクションカメラの選び方を初心者向けに解説。4K、手ブレ補正、防水、バッテリー、GoPro・DJI・Insta360・AKASOの代表モデルを紹介します。

スマートリングおすすめ5選 睡眠・健康管理に合う選び方
スマートリングおすすめ5選を紹介します。睡眠、心拍、回復スコア、対応スマホ、サブスク、サイズ選びを比較し、健康管理に合う選び方を整理します。